First of all, a few important notes that you should definitely pay attention to.



The universal wind sensor firmware supports various wind sensors. It is based on the firmware for DIY wind sensor WiFi 1000 and has been expanded to include further wind sensor types. Different types of sensors, such as analogue, magnetic and digital, can be connected. The corresponding wind sensor is selected in the firmware. No other settings need to be made.… Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig: Remote control for Raymarine Evo Pilot
The user matztam from the sailing forum has presented a remote control for the Raymarine Evo Pilot. The remote control works on 433 MHz and converts the received signals into the NMEA2000 network. In this way, the settings for the Raymarine autopilot can be made very conveniently.… Continue reading
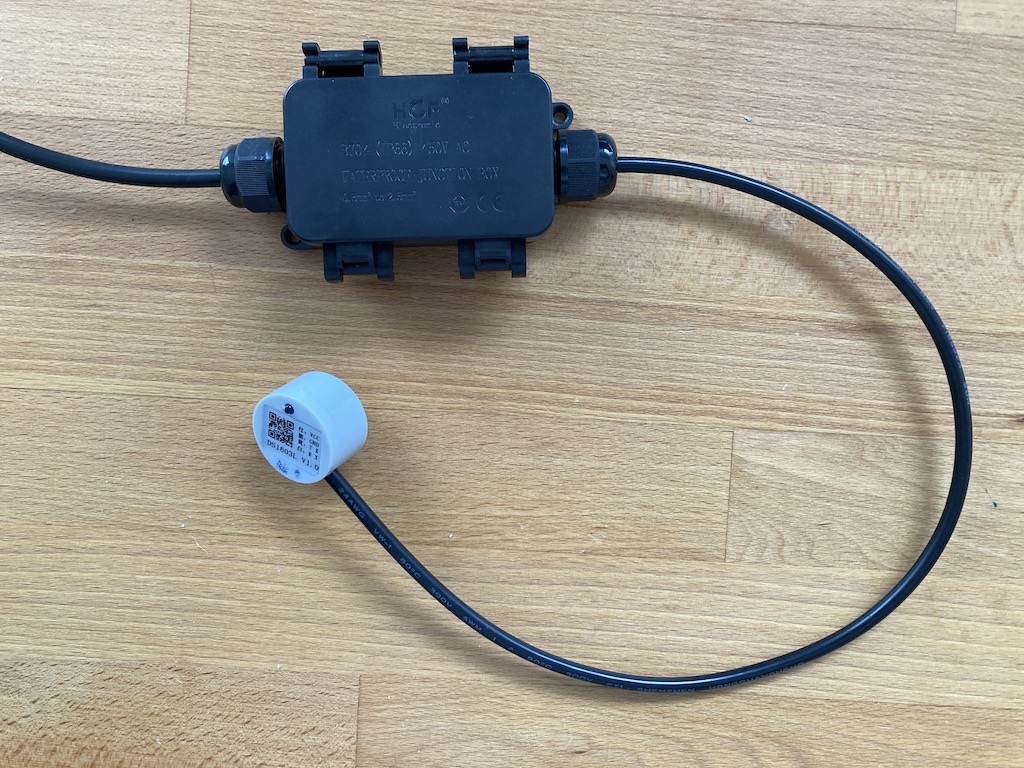
Fig .: Ultrasonic level sensor
https://www.segeln-forum.de/thread/76476-ber%C3%BChrungsloses-messen-von-tankinhalten/?postID=2301715#post2301715
Fred has another implementation of an ultrasonic tank sensor with him SensESP and a Wemos D1 mini. The Ultrasonic sensor DS1603L detects liquid levels in a tank and provides the corresponding measured values via SensESP via WiFi SignalK. SensESP is a software framework for the Arduino IDE with which various sensors can be easily integrated into SignalK.… Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig: WiFi battery monitor
The WiFi battery monitor can be integrated into SignalK. The measurement data can then be displayed in the instrument panel. A small detour via MQTT is necessary for integration in SignalK. Since the WiFi battery monitor can also communicate with the Tasmota software via MQTT as standard, we use this interface in conjunction with the SignalK plug-in signal-mqtt-gw by Teppo Kurki.… Continue reading
First of all, a few important notes that you should definitely pay attention to.
While searching the Internet for a battery monitor for DC voltages, I came across the PZME-017. The Peacefair company is known for various inexpensive battery monitors with LCD displays such as the PZEM-015.

Fig: PZEM-017 (100A version, with shunt and USB-RS485 adapter)

Fig: PZEM-015 (300A version as a pure display variant)
The PZEM-017 has the following features:
- Voltage measurement 0… 300V DC
- Current measurement: 10A, 50A, 100A, 200A, 300A (from 50A via external shunt)
- Display of the current power in watts
- Energy display in kWh for the current day, previous day and total consumption display
- Modbus RTU-Interface (RS485, 9600Bd, 8N2, binary data transmission)
- Supported Modbus commands:
- 0x03 Read memory register
- 0x04 Read input register
- 0x06 Write single register
- 0x41 calibration
- 0x42 Reset energy measurement
- 7 devices can be used on the Modbus via adjustable ID 1… 7, ID 0 broadcast
- USB-RS485 adapter (CH341)
In contrast to the PZEM-015, the PZEM-017 has no display and transmits the measurement data via the Modbus.… Continue reading
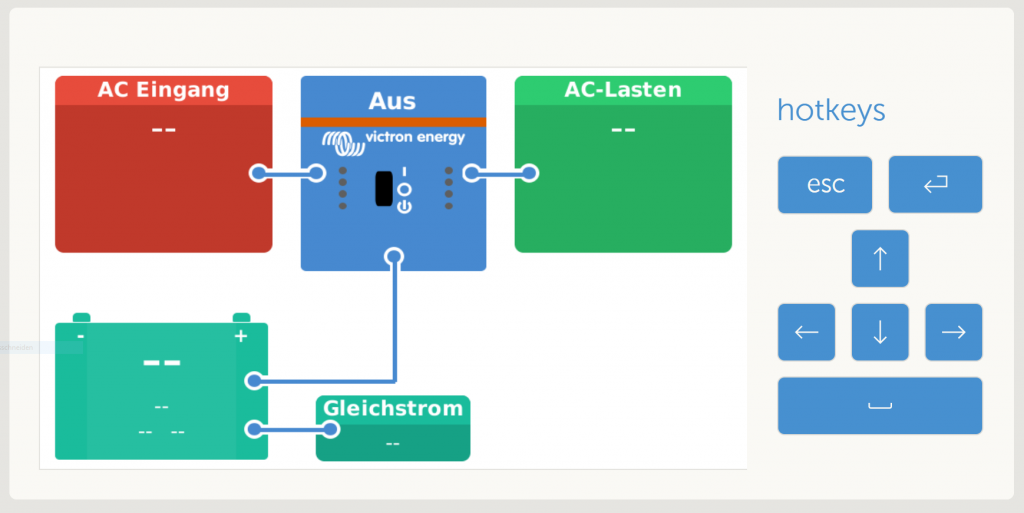
Stefan Kaufmann has on his website https://obenschlaefer.com/ presented an inexpensive energy monitor that is also interesting for boat enthusiasts. He originally built the energy monitor for his camper in order to be able to monitor the energy supply. The system is based on components from Victron on. The centerpiece is a Raspi with the free Venus OS firmware from Victron, which is also included in commercial hardware runs, but in this case on an inexpensive Raspi3B.… Continue reading
Video: https://youtu.be/NCJYmDuf2Jg

The Ruuvi sensor day is a small, smart sensor device. This allows the following data to be recorded:
- temperature
- Humidity
- Air pressure
- 3-axis acceleration sensor
- waterproof case
- Data storage in mobile phone app
- Android and iPhone app available
The data is sent to a data terminal at defined intervals using Bluetooth Low Energy to save energy. This can be a cell phone, for example, where you can look at the data.… Continue reading
First of all, a few important notes that you should definitely pay attention to.
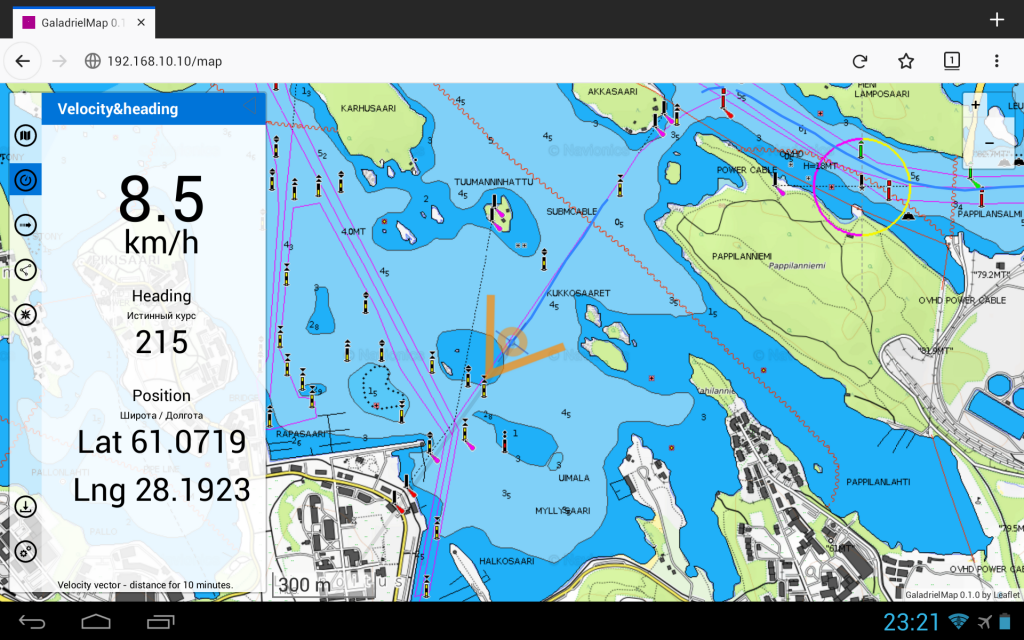
GaladrielMap is a web-based navigation software by Vladimir Kalachikhin. The name of the software is named after its boot. The software is based on a large number of PHP scripts that generate websites and are published via a web server. The websites can be viewed on any device such as mobile phones, tablets and laptops. Continue reading

The AZ touch Mod is a small 2.4 ″ touch color display with 320 x 240 pixels. On the base board can be used as a control unit ESP32C or a Wemos D1 mini be attached. A small breadboard allows you to set up your own circuits to expand the display.
The AZ-Touch has the following features:
- Wall housing 120mm x 80mm x 35mm (W x H x D)
- Resistive touchscreen 2.4 inch (6.14 cm) color TFT with 320 x 240 pixels (ILI9341)
- For D1mini or ESP32 Dev-Kit C V2 / 4
- built-in piezo buzzer
- Integrated 5V voltage regulator (input voltage 9 - 35V DC)
- power consumption approx.
...
Continue reading
First of all, a few important notes that you should definitely pay attention to.
SensESP is a library that facilitates the integration of ESP8266 and ESP32 based sensors and actuators in a signaK network. The framework is based on PlatformIO and is mostly written in C++. Basically, recurring and important functions are mapped by the framework, so that programming and connecting your own sensors to SignalK is quite easy.… Continue reading