This guide was created by user "Northern Comfort" from the Sailing forum and is intended only as a suggestion and to describe the process he used to get the program running. As a Linux/Raspberry newbie, this is certainly not the best or correct approach. If anyone can describe a simpler and/or better approach, please correct the guide:
1. Connect the NASA USB PC Box to the Raspberry and supply it with power
2. Installation of qt5 creator and libqt5serialport5-dev packages
command: sudo apt-get install ….
sudo apt-get install libqt5serialport5-dev
3. Download the file from Github using the button "Code" and "Download ZIP"
https://github.com/juerec/pc-navtex
4. Unpack the zip file under /home/pi/….
5. Open the terminal and switch to the appropriate directory.
command: CD /home/pi/pc-navtex-master/pc-navtex
If you use a different directory, you must take this into account in the commands below.
6. Then run the commands in the terminal as described on GitHub:
Command: qmake -qt5
afterward make
7. Now something happens in the terminal. Please wait until the input field reappears.
8. Then move the udev rule in the terminal. The udev rule ensures that the navtex box is correctly entered into the system structure and recognized.
Command:
sudo mv -v /home/pi/pc-navtex-master/udev/91-pnavtex.rules/etc/udev/rules.d
9. Reboot Raspberry. I don't think you really have to. But it doesn't hurt either.
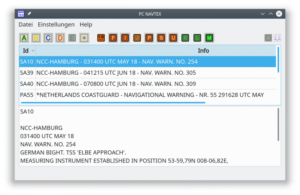
8. The executable file is now in the directory pc-navtex-master/pc-navtex ...... you can double-click it and the program will start. If you want, you can now create a shortcut in the menu:
10. Click on the raspberry at the top left; then "Settings" and "Main Menu Editor", the rest should be self-explanatory.
Unfortunately, you cannot configure the Navtex box with this program, eg the times of the frequency change from 490 kHz to 518 kHz. For this you need the original Windows program. But after that everything works great.
Info
If you are looking for further information about Navtex, you will find some information here:
http://weather.mailasail.com/Franks-Weather/European-And-Mediterranean-Navtex-Schedules
https://www.segeln-forum.de/thread/74695-altern-softw-f%C3%BCr-nasa-pc-navtex-usb-auch-ras-pi/?postID=2119293#post2119293