First of all, a few important notes that you should definitely pay attention to.
Fig .: Clipper wind instrument (Clipper)
Some older models of Clipper wind instruments have a 5-pin DIN socket on the back for a daughter display. The wind data are also output as NMEA0183 via this DIN socket. Unfortunately, the signals do not correspond to the RS422 standard and cannot be used further. 5V TTL levels are used as the output signal with very low current carrying capacity.… Continue reading
Jürgen has in Sailing forum presented a weather fax receiver that I would like to introduce here. A simple world receiver and the weather fax app are used to receive weather faxes HF WEATHER FAX used. We recommend the following two world receivers from Sony, which have proven themselves:

Fig .: ICF-2001D
Depending on the travel area, the corresponding short-wave transmission frequency is set in the world receiver. With the app, the digitally coded transmission is received via the microphone and displayed accordingly as an image.… Continue reading
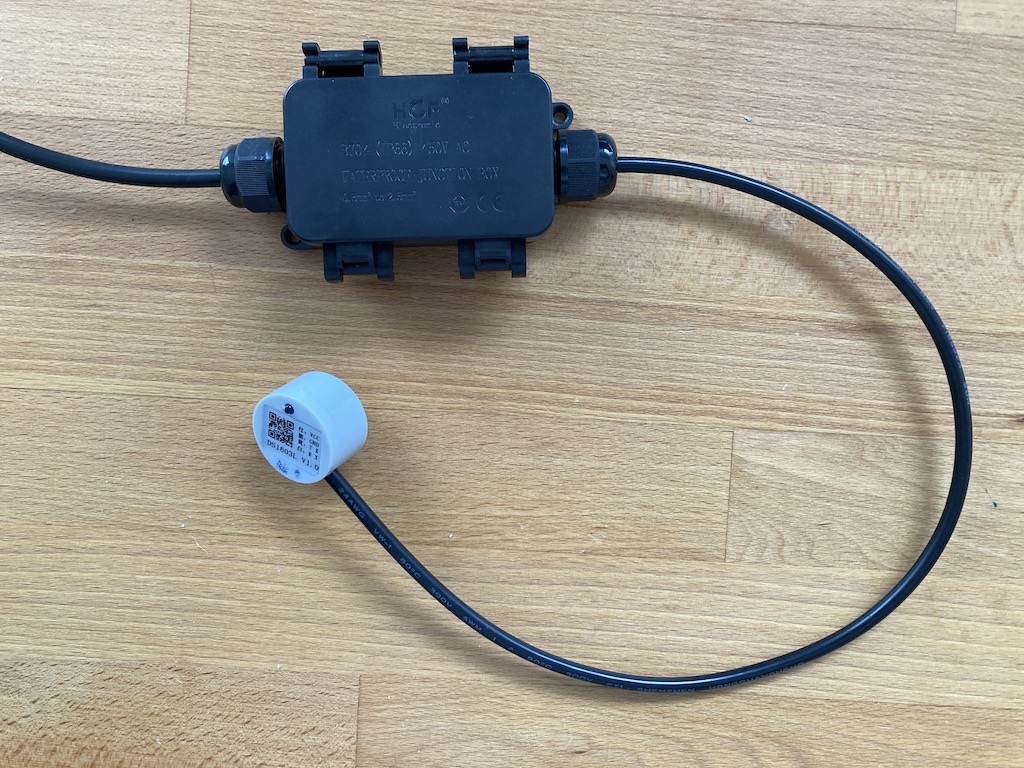
Fig .: Ultrasonic level sensor
https://www.segeln-forum.de/thread/76476-ber%C3%BChrungsloses-messen-von-tankinhalten/?postID=2301715#post2301715
Fred has another implementation of an ultrasonic tank sensor with him SensESP and a Wemos D1 mini. The Ultrasonic sensor DS1603L detects liquid levels in a tank and provides the corresponding measured values via SensESP via WiFi SignalK. SensESP is a software framework for the Arduino IDE with which various sensors can be easily integrated into SignalK.… Continue reading
For hobbyists, the world of electronics offers interesting microcontroller modules with which many demanding projects can be implemented. Microcontrollers that can be easily and easily programmed are of particular interest. Atmel offers a range of 8-bit microcontrollers with many additional functions integrated, such as program memory, data memory, counters, pulse-width modulated outputs (PWM outputs), analog-to-digital converters (AD converters), digital-to-analog converters (DA converter), serial interface (RS232), various bus systems (I2C) and much more, so that you can implement your own electronic projects without much additional effort.… Continue reading
First of all, a few important notes that you should definitely pay attention to.
While searching the Internet for a battery monitor for DC voltages, I came across the PZME-017. The Peacefair company is known for various inexpensive battery monitors with LCD displays such as the PZEM-015.

Fig: PZEM-017 (100A version, with shunt and USB-RS485 adapter)

Fig: PZEM-015 (300A version as a pure display variant)
The PZEM-017 has the following features:
- Voltage measurement 0… 300V DC
- Current measurement: 10A, 50A, 100A, 200A, 300A (from 50A via external shunt)
- Display of the current power in watts
- Energy display in kWh for the current day, previous day and total consumption display
- Modbus RTU-Interface (RS485, 9600Bd, 8N2, binary data transmission)
- Supported Modbus commands:
- 0x03 Read memory register
- 0x04 Read input register
- 0x06 Write single register
- 0x41 calibration
- 0x42 Reset energy measurement
- 7 devices can be used on the Modbus via adjustable ID 1… 7, ID 0 broadcast
- USB-RS485 adapter (CH341)
In contrast to the PZEM-015, the PZEM-017 has no display and transmits the measurement data via the Modbus.… Continue reading

Video https://youtu.be/0G_1A66hpyE
Video used as voltage input with limit alarm: https://youtu.be/XZPPG5St0Ko
https://www.segeln-forum.de/thread/79394-instrumentendisplay-diy/
Standard built-in instruments with a diameter of 52mm are often used to display various measured values on boats. These can often only be used for very special tasks with very special sensors. Unfortunately, the display layout differs depending on the task and there is no consistent appearance. In the search for a modifiable display, I came across a built-in instrument for an oil pressure gauge of 0...150 psi.... Continue reading
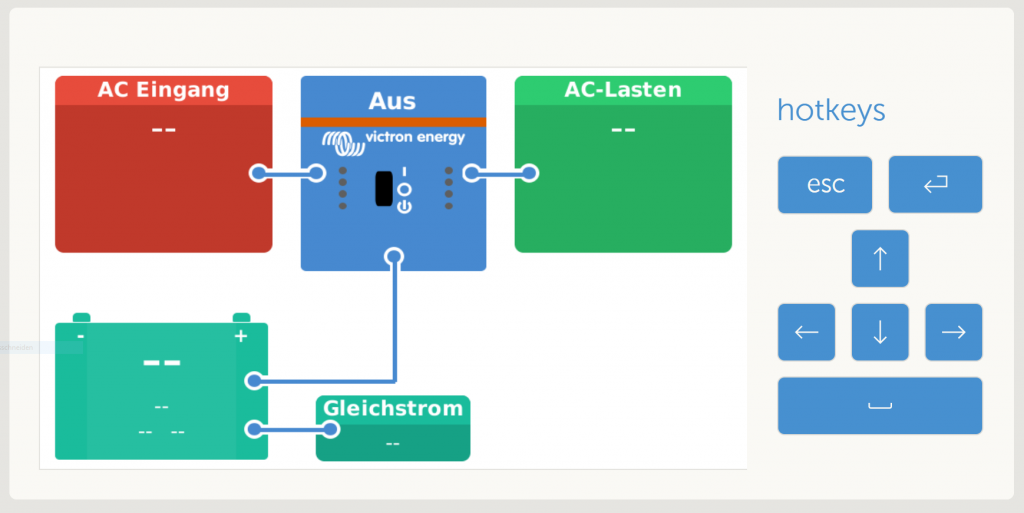
Stefan Kaufmann has on his website https://obenschlaefer.com/ presented an inexpensive energy monitor that is also interesting for boat enthusiasts. He originally built the energy monitor for his camper in order to be able to monitor the energy supply. The system is based on components from Victron on. The centerpiece is a Raspi with the free Venus OS firmware from Victron, which is also included in commercial hardware runs, but in this case on an inexpensive Raspi3B.… Continue reading
Video: https://youtu.be/NCJYmDuf2Jg

The Ruuvi sensor day is a small, smart sensor device. This allows the following data to be recorded:
- temperature
- Humidity
- Air pressure
- 3-axis acceleration sensor
- waterproof case
- Data storage in mobile phone app
- Android and iPhone app available
The data is sent to a data terminal at defined intervals using Bluetooth Low Energy to save energy. This can be a cell phone, for example, where you can look at the data.… Continue reading

The AZ touch Mod is a small 2.4 ″ touch color display with 320 x 240 pixels. On the base board can be used as a control unit ESP32C or a Wemos D1 mini be attached. A small breadboard allows you to set up your own circuits to expand the display.
The AZ-Touch has the following features:
- Wall housing 120mm x 80mm x 35mm (W x H x D)
- Resistive touchscreen 2.4 inch (6.14 cm) color TFT with 320 x 240 pixels (ILI9341)
- For D1mini or ESP32 Dev-Kit C V2 / 4
- built-in piezo buzzer
- Integrated 5V voltage regulator (input voltage 9 - 35V DC)
- power consumption approx.
...
Continue reading
First of all, a few important notes that you should definitely pay attention to.
SensESP is a library that facilitates the integration of ESP8266 and ESP32 based sensors and actuators in a signaK network. The framework is based on PlatformIO and is mostly written in C++. Basically, recurring and important functions are mapped by the framework, so that programming and connecting your own sensors to SignalK is quite easy.… Continue reading