Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
Abb.: Clipper Windinstrument (Clipper)
Einige ältere Modelle der Clipper-Windinstrumente besitzen auf der Rückseite einen 5-polige DIN-Buchse für ein Tochterdisplay. Über diese DIN-Buchse werden auch die Winddaten als NMEA0183 ausgegeben. Leider entsprechen die Signale nicht dem RS422 Standard und man kann sie nicht sinnvoll weiter verwenden. Als Ausgangssignal werden 5V-TTL-Pegel verwendet mit sehr geringer Strombelastbarkeit.… weiterlesen
Jürgen hat im Segeln-Forum einen Wetterfaxempfänger vorgestellt den ich hier gerne vorstellen möchte. Zum Empfang von Wetterfaxen wird ein einfacher Weltempfänger und die Wetterfax-App HF WEATHER FAX verwendet. Empfehlenswert sind folgende zwei Weltempfänger von Sony, die sich bewährt haben:

Abb.: ICF-2001D
Je nach Fahrtgebiet wird die entsprechende Kurzwellen-Sendefrequenz im Weltempfänger eingestellt. Mit der App wird über das Mikrofon die digital kodierte Aussendung empfangen und entsprechend als Bild dargestellt.… weiterlesen
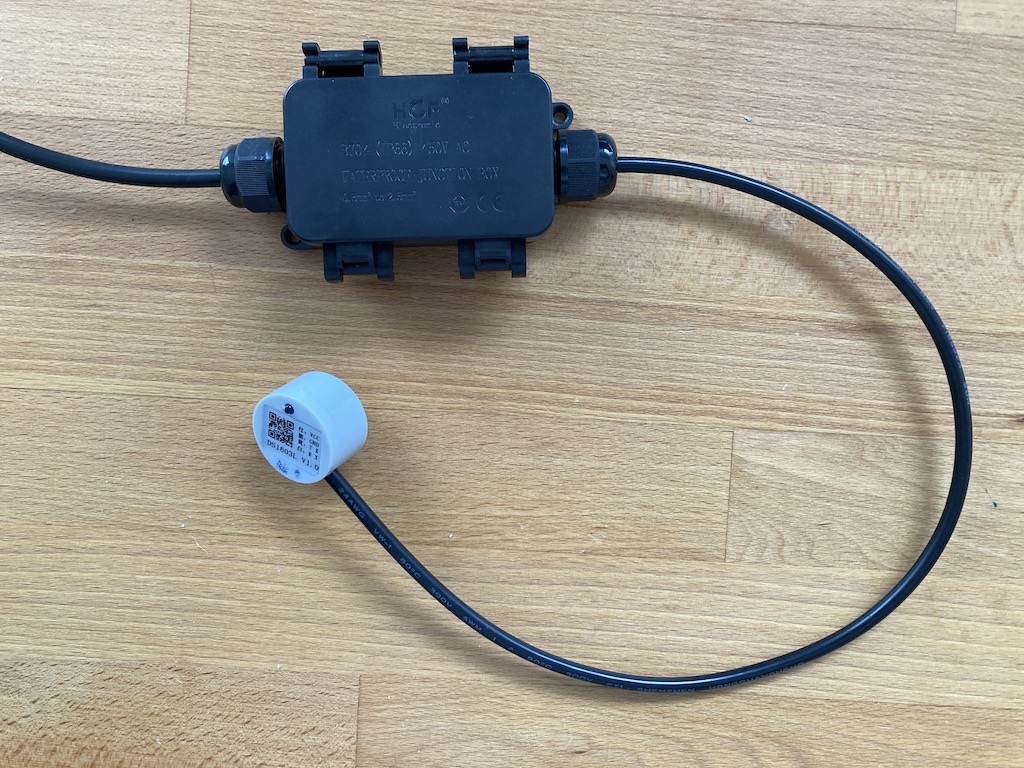
Abb.: Ultraschall Füllstandssensor
https://www.segeln-forum.de/thread/76476-ber%C3%BChrungsloses-messen-von-tankinhalten/?postID=2301715#post2301715
Fred hat eine weitere Implementierung eines Ultraschall-Tanksensors mit SensESP und einem Wemos D1 mini vorgenommen. Der Ultraschall-Sensor DS1603L erfasst Flüssigkeitsstände in einem Tank und gibt die entsprechenden Messwerte über SensESP per WiFi an SignalK. SensESP ist ein Softwareframework für die Arduino-IDE mit der recht einfach verschiedene Sensoren in SignalK eingebunden werden.… weiterlesen
Für Bastler bietet die Welt der Elektronik interessante Mikrocontroller-Module mit denen man viele anspruchsvolle Projekte umsetzen kann. Dabei sind insbesondere Mikrocontroller interessant die sich einfach und unkompliziert programmieren lassen. Die Firma Atmel bietet eine Reihe von 8-Bit Mikrocontrollern an, in die viele Zusatzfunktionen integriert sind wie Programmspeicher, Datenspeicher, Zähler, pulsweitenmodulierte Ausgänge (PWM-Ausgänge), Analog-Digital-Wandler (AD-Wandler), Digital-Analogwandler (DA-Wandler), serielle Schnittstelle (RS232), verschiedene Bussysteme (I2C) und vieles mehr, so dass man ohne großen Zusatzaufwand eigene Elektronik-Projekte umsetzen kann.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
Auf der Suche im Internet nach einem Batteriemonitor für Gleichspannungen bin ich auf den PZME-017 gestoßen. Die Firma Peacefair ist bekannt für diverse kostengünstige Batteriemonitore mit LCD-Anzeige wie den PZEM-015.

Abb: PZEM-017 (100A Version, mit Shunt und USB-RS485-Adapter)

Abb: PZEM-015 (300A Version als reine Display-Variante)
Der PZEM-017 hat folgende Merkmale:
- Spannungsmessung 0…300V DC
- Strommessung: 10A, 50A, 100A, 200A, 300A (ab 50A über externen Shunt)
- Anzeige der aktuellen Leistung in Watt
- Energieanzeige in kWh für aktuellen Tag, Vortag und Gesamtverbrauchsanzeige
- Modbus RTU-Schnittstelle (RS485, 9600Bd, 8N2, Binär-Datenübertragung)
- Unterstützte Modbus-Befehle:
- 0x03 Lesen Speicher-Register
- 0x04 Lesen Eingangs-Register
- 0x06 Schreiben Einzelregister
- 0x41 Kalibrierung
- 0x42 Reset Energiemessung
- 7 Geräte am Modbus benutzbar über einstellbare ID 1…7, ID 0 Broadcast
- USB-RS485-Adapter (CH341)
Der PZEM-017 hat im Gegensatz zum PZEM-015 kein Display und überträgt die Messdaten über den Modbus.… weiterlesen

Video https://youtu.be/0G_1A66hpyE
Video mit Verwendung als Spannungseingang mit Grenzwertalarm: https://youtu.be/XZPPG5St0Ko
https://www.segeln-forum.de/thread/79394-instrumentendisplay-diy/
Zur Anzeige diverser Messwerte auf Booten werden oft Standard-Einbauinstrumente mit einem Durchmesser von 52mm verwendet. Oft sind diese nur für ganz spezielle Aufgaben mit ganz speziellen Sensoren verwendbar. Leider unterscheidet sich das Displaylayout je Aufgabenstellung und ein konsistentes Aussehen ist nicht gegeben. Auf der Suche nach einem modifizierbaren Display bin ich auf ein Einbauinstrument für eine Öldruckanzeige 0…150 psi gestoßen.… weiterlesen
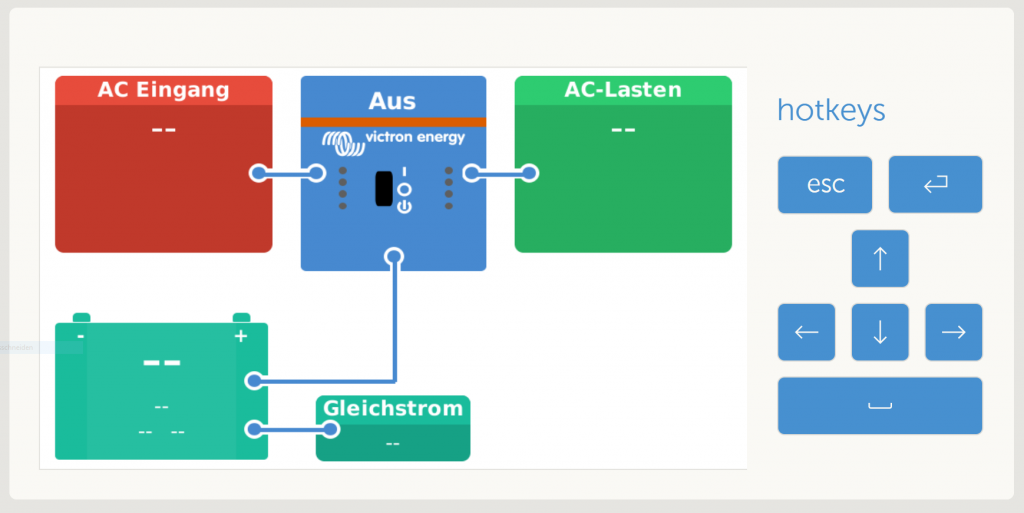
Stefan Kaufmann hat auf seiner Webseite https://obenschlaefer.com/ einen kostengünstigen Energiemonitor vorgestellt der auch für Bootsfreunde interessant ist. Ursprünglich hat er den Energiemonitor für seinen Camper gebaut, um die Energieversorgung überwachen zu können. Das System baut auf Komponenten von Victron auf. Das Herzstück ist ein Raspi mit der freien Venus OS-Firmware von Victron die ebenfalls in kommerzieller Hardware läuft, in diesem Fall aber auf einem kostengünstigen Raspi3B.… weiterlesen
Video: https://youtu.be/NCJYmDuf2Jg

Das Ruuvi Sensor Tag ist ein kleines smartes Sensor-Device. Damit können folgende Daten erfasst werden:
- Temperatur
- Luftfeuchte
- Luftdruck
- 3-Achs Beschleunigungssensor
- wasserdichtes Gehäuse
- Datenspeicherung in Handy App
- Android- und IPhone-App verfügbar
Die Daten werden energiesparend per Bluetooth Low Energy in definierten Zeitabständen zu einem Datenendgerät gesendet. Das kann z.B. ein Handy sein wo man sich die Daten anschauen kann.… weiterlesen

Das AZ-Touch Mod ist ein kleines 2.4″-Touch-Farb-Display mit 320 x 240 Pixeln. Auf der Basis-Platine können als Steuereinheit ein ESP32C oder ein Wemos D1 mini aufgesteckt werden. Ein kleines Lochrasterfeld ermöglicht den Aufbau eigener Schaltungen zur Erweiterung des Displays.
Das AZ-Touch hat folgende Merkmale:
- Wandgehäuse 120mm x 80mm x 35mm (W x H x D)
- Resistiver Touchscreen 2,4 Zoll (6,14cm) Farb-TFT mit 320 x 240 Pixeln (ILI9341)
- Für D1mini oder ESP32-Dev-Kit C V2/4
- eingebauter Piezosummer
- Integrierter 5V Spannungsregler (Eingangsspannung 9 – 35V DC)
- Stromverbrauch ca.
…
weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
SensESP ist eine Bibliothek, die die Integration von ESP8266 und ESP32 basierten Sensoren und Aktoren in ein signaK-Netzwerk erleichtert. Das Framework basiert auf PlatformIO und ist überwiegend in C++ geschrieben. Grundsätzlich werden wiederkehrende und wichtige Funktionen durch das Framework abgebildet, so dass die Programmierung und Anbindung eigener Sensoren an SignalK recht einfach ist.… weiterlesen