
Fig. Shelly 1
Anyone who anchors is obliged to set an anchor light so that you can be recognized on the open water surface in the dark. Typically, the light is switched on manually at dusk and off again at sunrise. There is no problem switching it on. But often you forget to switch it off and the anchor light is then permanently on and consumes electricity unnecessarily.… Continue reading

Fig. Lilygo T-Watch 2020 (Lilygo)
Jan Dytrych has started a software project to be able to display data from SignalK and receive alarms with a smart watch. Not just any common clock under Android is used as a smart watch. He uses the smart watch Liligo T Watch 2020. The special feature of this clock is that it has an ESP32 installed as a processor and can be controlled via the Arduino IDE or… Continue reading

why
I've always found the idea of not only showing the course on my plotter when the boat is moving, but also when it's bobbing along quietly, I've always found it exciting.
After searching the I-Net for different manufacturers, it quickly became clear that I might not need an e-compass on board at current prices.… Continue reading
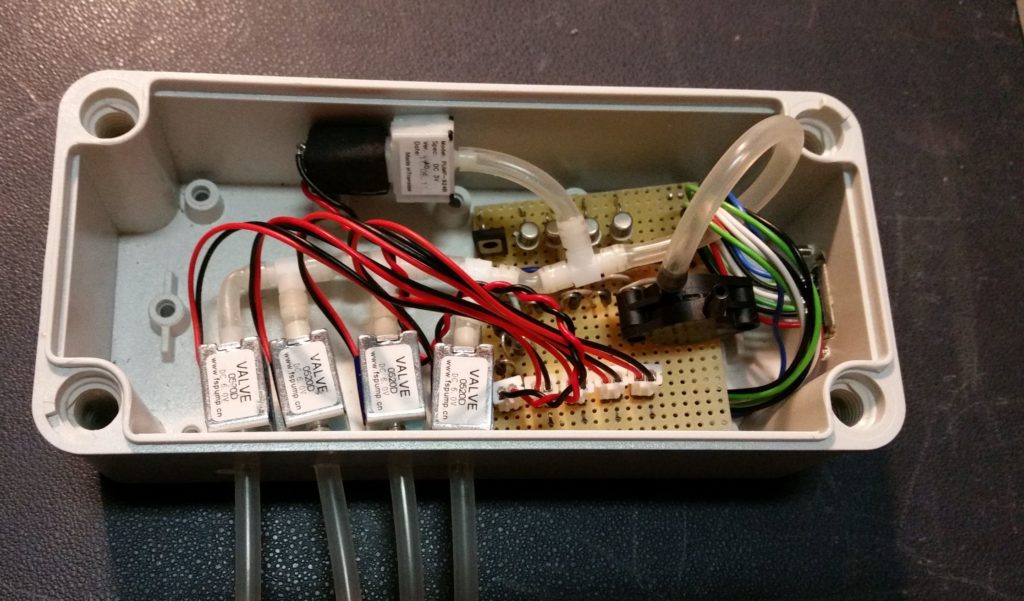
Fig. Control box with pump, pressure sensor and valves
In the Facebook group Raspberry Pi for Boats I saw a cool solution for a level measurement. Erik from Finland constructed a monitor for 4 tanks with an air pressure sensor. The functional principle is based on the displacement of liquids in a measuring tube. A corresponding air pressure then builds up in the measuring tube, which is proportional to the filling level.… Continue reading
First of all, a few important notes that you should definitely pay attention to.
Disclaimer: The descriptions of the wiring and the pin assignments correspond to what I found in my boat. Therefore, if you want to rebuild the interface, you have to make sure that the wiring and pin assignments are identical on your own boat or adapt the interface accordingly. The entire description of this solution is in an experimental state and comes without any warranty.... Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig .: Exterior view
- NMEA0183 and NMEA2000
- Only three other parts (ESP32, roll pin, CAN BUS) are required
- Angular resolution in 0.1 ° steps
- Data can be displayed in the browser (in AP mode even without an external network)
- Code fully commented on GitHub
This project describes the conversion of the replacement anemometer Ventus W132 with minimal material expenditure.… Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig: Yachta wind sensor
The Yachta wind sensor is a further development of a wind sensor from the Yachta user at bei Thingiverse was presented. The technical principle of operation is based on one Hall sensor for measuring wind speed and on one magnetic rotation sensor for measuring the wind direction. Udo from the german sailing forum took up the idea and made some improvements to the wind sensor.… Continue reading
First of all, a few important notes that you should definitely pay attention to.



The universal wind sensor firmware supports various wind sensors. It is based on the firmware for DIY wind sensor WiFi 1000 and has been expanded to include further wind sensor types. Different types of sensors, such as analogue, magnetic and digital, can be connected. The corresponding wind sensor is selected in the firmware. No other settings need to be made.… Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig: radio remote control
It is often the case that the anchor winch can only be operated via permanently installed switches and the switches are mounted in such a way that the anchor halyard or the hauling up cannot be properly seen. The use of an additional remote control is much more practical. This allows you to operate the anchor winch from any location and is no longer subject to restrictions.… Continue reading
First of all, a few important notes that you should definitely pay attention to.

Fig: Remote control for Raymarine Evo Pilot
The user matztam from the sailing forum has presented a remote control for the Raymarine Evo Pilot. The remote control works on 433 MHz and converts the received signals into the NMEA2000 network. In this way, the settings for the Raymarine autopilot can be made very conveniently.… Continue reading