
Abb. Shelly 1
Wer ankert ist verpflichtet ein Ankerlicht zu setzen, damit man bei Dunkelheit auf freier Wasserfläche erkannt wird. Typischer Weise schaltet man das Licht manuell bei Dämmerung ein und bei Sonnenaufgang wieder aus. Beim Einschalten hat man kein Problem. Oft vergisst man aber das Ausschalten und das Ankerlicht ist dann dauerhaft an und verbraucht unnötig Strom.… weiterlesen

Abb. Lilygo T-Watch 2020 (Lilygo)
Jan Dytrych hat ein Softwareprojekt gestartet, um mit einer Smart Watch Daten von SignalK anzeigen zu können und Alarme zu empfangen. Als Smart Watch wird nicht irgend eine gängige Uhr unter Android benutzt. Er verwendet die Smart Watch Liligo T-Watch 2020. Die Besonderheit dieser Uhr ist, dass sie einen ESP32 als Prozessor verbaut hat und über die Arduino IDE bzw.… weiterlesen

Warum
Ich fand die Idee schon immer spannend, dass auf meinem Plotter nicht nur dann der Kurs angezeigt wird wenn sich das Boot in Bewegung setzt, sondern auch, wenn es ruhig vor sich hindümpelt.
Nach der Suche im I-Net bei unterschiedlichen Herstellern war schnell klar, dass ich bei aktuellen Preisen vielleicht doch keinen E-Kompass an Bord brauche.… weiterlesen
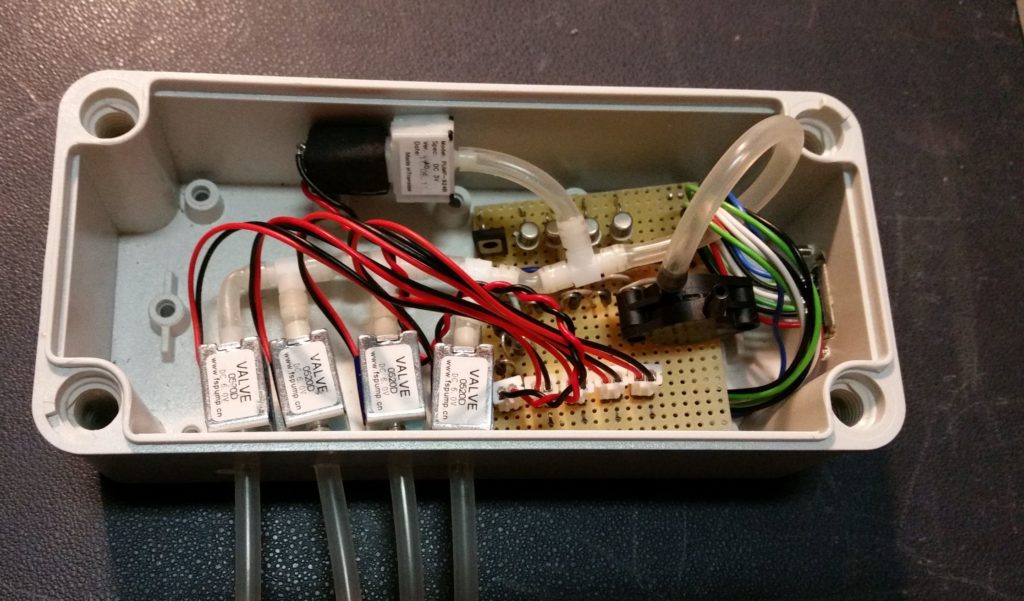
Abb. Steuerbox mit Pumpe, Drucksensor und Ventilen
In der Facebook Gruppe Raspberry Pi for Boats habe ich eine coole Lösung für eine Füllstandmessung gesehen. Erik aus Finnland hat mit einem Luftdrucksensor eine Überwachung für 4 Tanks konstruiert. Das Funktionsprinzip basiert auf der Verdrängung von Flüssigkeiten in einem Messrohr. Es baut sich dann ein entsprechender Luftdruck im Messrohr aus der proportional zur Füllstandhöhe ist.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
Disclaimer: Die Beschreibungen der Verdrahtung und der Pinbelegungen entsprechen dem, was ich in meinem Boot vorgefunden habe. Deshalb muss man, wenn man das Interface nachbauen möchte, sicherstellen, dass die Verdrahtungen und Pinbelegungen auf dem eigenen Boot identisch sind oder das Interface entsprechend anpassen. Die gesamte Beschreibung dieser Lösung ist in einem experimentellen Zustand und kommt ohne jegliche Gewährleistung.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

Abb.: Außenansicht
- NMEA0183 und NMEA2000
- Nur drei weitere Teile (ESP32, Spannstift, CAN BUS) nötig
- Winkelauflösung in 0,1°-Schritten
- Darstellung der Daten im Browser möglich (im AP-Modus auch ohne fremdes Netzwerk)
- Code vollständig kommentiert auf GitHub
Dieses Projekt beschreibt den Umbau des Ersatzwindmessers Ventus W132 mit minimalem Materialaufwand.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

Abb: Windsensor Yachta
Der Windsensor Yachta ist eine Weiterentwicklung eines Windsensors vom User Yachta der bei Thingiverse vorgestellt wurde. Das technische Funktionsprinzip basiert auf einem Hallsensor für die Messung der Windgeschwindigkeit und auf einem magnetischen Rotationssensor zur Messung der Windrichtung. Udo aus dem Segeln-Forum hat die Idee aufgegriffen und einige Verbesserungen am Windsensor vorgenommen.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.



Die universelle Windsensor Firmware unterstützt verschiedene Windsensoren. Sie basiert auf der Firmware zum DIY Windsensor WiFi 1000 und wurde entsprechend um weiter Windsensor-Typen erweitert. Dabei können unterschiedliche Sensorarten, wie analog, magnetisch und digital angebunden werden. In der Firmware wird der entsprechende Windsensor ausgewählt. Weitere Einstellungen müssen nicht vorgenommen werden.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

Abb: Funkfernbedienung
Oft ist es so, dass die Ankerwinch nur über fest verbaute Schalter bedient werden kann und die Schalter so angebracht sind, dass man den Ankerfall bzw. das Aufholen nicht richtig einsehen kann. Wesentlich praktischer ist der Einsatz einer zusätzlichen Fernbedienung. Dadurch kann man von jedem beliebigen Ort aus die Ankerwinch bedienen und unterliegt keinen Einschränkungen mehr.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

Abb: Fernbedienung für Raymarine Evo Pilot
Der User matztam aus dem segeln-forum hat eine Fernbedienung für den Raymarine Evo Pilot vorgestellt. Die Fernbedienung funkt auf 433 MHz und setzt die empfangenen Signale in das NMEA2000 Netzwerk um. So lassen sich die Einstellungen für den Autopiloten von Raymarine sehr komfortabel mit vornehmen.… weiterlesen