First of all, a few important notes that you should definitely pay attention to.

Fig.: B&G Zeuss with NMEA2000 connection technology (SVB)
Bus systems overview
In the marine sector, a large number of different bus systems are used for data transmission between sensors and display devices. Depending on the manufacturer, the bus systems use a different hardware basis. The systems are often not compatible with each other and require special converters or gateways for data exchange between the bus systems. Many manufacturers use CAN as the hardware layer for their bus systems because the differential data transmission is very robust. However, this does not mean that the CAN protocol is also used at a higher protocol level. Simpler systems use slow serial protocols that cannot match the performance of the CAN protocol like NMEA2000.
The following overview shows the most frequently used bus systems.
| bus system | hardware base | speed | transmission technology | mesh structure | NMEA2000 compatibility |
Open source projects available |
connection technology |
| NMEA0183 | RS232, RS422, RS485, TTL 3.3V, TTL 5V, Ethernet, WiFi |
4800…115200 baud, 8N1 |
NMEA0183 Sentences |
Point to point / point to multipoint |
no* |
Yes |
not specified |
| NMEA2000 | CAN | 250 Kbit |
NMEA2000 telegrams | bus structure | – |
Yes | M12, 5-pin, A-coded |
| OneNet |
ethernet |
100 MBit/1 GBit | OneNet Telegrams |
bus structure |
no* |
no | Proprietary connection technology, RJ45 |
| SeaTalk | Serial proprietary | 9600 baud, 9N1 | Proprietary binary protocol | bus structure | no |
Yes | 3-pin, proprietary connection technology |
| SeaTalk NG | CAN | 250 kbit | NMEA2000 telegrams | bus structure | restricted |
indirectly via NMEA2000 |
5-pin, proprietary connection technology |
| SimNet |
CAN |
250 kbit |
NMEA2000 telegrams | bus structure | restricted |
indirectly via NMEA2000 |
5-pin, proprietary connection technology |
| RayNet |
ethernet |
100 MBit/1 GBit |
OneNet proprietary |
bus structure |
no* |
no | RJ45, proprietary connection technology |
| Fastnet |
CAN |
28800 baud, 8O2 |
Proprietary Protocol |
bus structure |
no |
no |
Proprietary connection technology |
| Micronet | Wireless 868MHz | 80 kbit | Proprietary binary protocol | point to point | no |
Yes |
Wireless |
| C-Net 2000 | CAN | 19200 baud, 8N1 ? | Proprietary CAN protocol | bus structure | no |
no |
2-pole, clamp contacts |
| CANet | CAN | 250 kbit | Proprietary binary protocol | bus structure | no |
no |
2-pole, clamp contacts |
| top line |
Serial proprietary | 38400 baud, 8N1 |
Proprietary binary protocol | bus structure | no |
no |
5-pin, proprietary connection technology |
| PBus |
CAN |
19200 baud, 8N1 ? |
Proprietary Protocol |
bus structure |
no |
no |
M12, 5-pin, A-coded |
| J1939 | CAN | 250 kbit | Vehicle CAN protocol | bus structure | no |
Yes | 6-pin and 4-pin, car connection technology |
| SignalK |
RS232, RS422, RS485, CAN, I2C, 1Wire, Ethernet, WiFi |
4.8 kbit…1 Gbit |
Open source protocol, JSON |
bus structure |
Yes |
Yes | not specified |
| SeaSmart |
RS232, RS422, RS485, CAN, Ethernet, WiFi | 4.8 kbit…1 Gbit | Proprietary protocol, supports NMEA0183 and NMEA2000 |
bus structure | Yes |
Yes |
not specified |
| ethernet |
CAT5 |
10 MBit…10 GBit |
TCP, UDP, HTTP, etc. |
bus structure |
no* | Yes | RJ45, fiber optic |
| WiFi |
802.11bgn, 802.11ac |
1 Mbit…300 Mbit |
TCP, UDP, HTTP, etc. |
bus structure |
no* | Yes | Wireless |
* NMEA2000 can be tunneled into other protocols, but is not directly compatible with them
Manufacturer overview
| Manufacturer | Bus systems used | Remarks |
| B&G | NMEA0183, NMEA2000, Fastnet, Ethernet |
Partly proprietary connection technology |
| cetrek | NMEA0183, NMEA2000, C-Net 2000 |
|
| Digital marine gauges |
SeaSmart, NMEA0183, NMEA2000, Ethernet |
|
| furuno | NMEA0183, NMEA2000, Ethernet |
|
| Garmin | NMEA0183, NMEA2000, CANet |
|
| lowrance | NMEA0183, NMEA2000 | |
| NASA/Clippers | NMEA0183 | Wind sensor only, TTL5V, requires adapter |
| NKE |
Topline, NMEA0183, NMEA2000, Ethernet |
Proprietary connection technology |
| Open Marine |
SignalK, NMEA0183, NMEA2000, SeaTalk, SeaSmart, Micronet, J1939, Ethernet |
|
| Philippi |
PBus |
M12 connection technology is not compatible with NMEA2000, although the same connectors are used. |
| Raymarine | SeaTalk, SeaTalk NG, Micronet, RayNet, NMEA0183, NMEA2000 |
Proprietary connection technology |
| Simrad | SimNet, NMEA0183, NMEA2000, Ethernet |
Proprietary connection technology |
| Yanmar | J1939 | |
| Volvo Penta | J1939 |
Bus data convertibility
Information from different bus systems can be exchanged within certain limits. This requires adapters or gateways. adapter are passive and are used to adapt the connection technology. With SeaTalk NG, Raymarine is pursuing a proprietary approach to connection technology, although the bus data is NMEA2000 data. The great advantage of this connection technology lies in the clear assignment of different bus systems using colour-coded plugs. This avoids installation errors. The disadvantages are expensive installation technology and incompatibilities with NMEA2000, which are remedied by special adapters.
If data from different protocols are to be exchanged, a Gateway necessary. The gateway in the form of a microcontroller then translates the protocols. It is often the case that not all data records in one protocol can be translated into the other protocol. This is mainly because some logs do not contain the complete data set of other logs. For example, NMEA0183 has fewer data sets than NMEA2000, which is significantly more extensive. Some gateways specialize in very specific application situations and only convert a subset of the data sets. To avoid nasty surprises, find out before you buy a gateway which data records can be converted between the protocols. Sometimes it is necessary to use two gateways in a row because some protocols cannot be translated directly. You then have to take the detour via an intermediate protocol.
The table below shows the convertibility between the different bus systems.
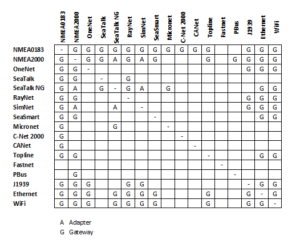
Tab.: Convertibility between bus systems