First of all, a few important notes that you should definitely pay attention to.

Fig: Yachta wind sensor
The Yachta wind sensor is a further development of a wind sensor from the Yachta user at bei Thingiverse was presented. The technical principle of operation is based on one Hall sensor for measuring wind speed and on one magnetic rotation sensor for measuring the wind direction. Udo from the german sailing forum took up the idea and made some improvements to the wind sensor. The shell wheel of the wind turbine was dismantled into several parts, so that 3D printing is easier. In addition, he has revised the electronics. Another magnetic rotation sensor has been selected that is easier to obtain. The one that is popular with hobbyists as an evaluation and communication unit ESP-12E used. In addition to the Yachta wind sensor, Udo has also redesigned another wind sensor and further improved some points in the mechanical structure. The objective of Udo's constructions was that the wind sensors could be easily reproduced without the need for special metal parts. As a hobbyist, you can obtain all the necessary parts from specialist retailers and hardware stores.
Both Udo and Jukolein have written firmware for the Yachta wind sensor that has different functionalities. With both firmware, the measurement data can be saved as NMEA0183 telegrams transmitted via WiFi and processed in appropriate software such as AVnav, OpenCPN. With the firmware from Jukolein, the measurement data can also be displayed on a website. Norbert's firmware for the WiFi 1000 wind sensor can also be used for the Yachta wind sensor. This firmware is universal and supports other commercial and non-commercial wind sensors as well. In terms of functionality, this firmware offers the greatest possibilities and also has a web interface for visualization and operation.
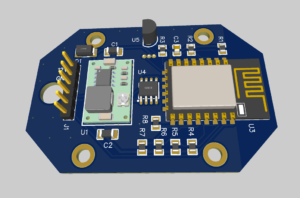
Fig: Board wind sensor Yachta
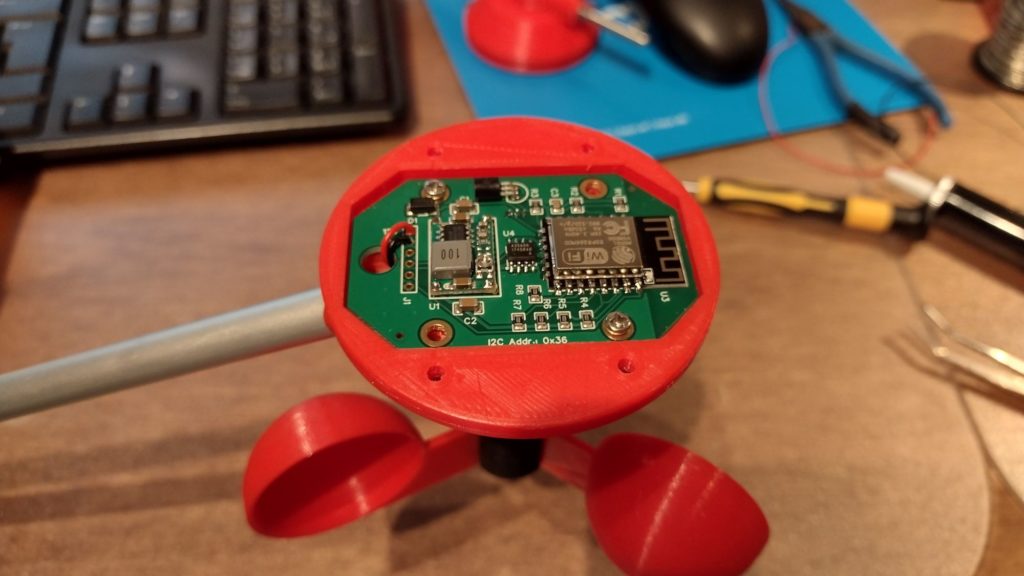
Fig: Built-in circuit board
Udo's circuit board was revised again by Norbert and improved in some points. The board can be easily accessed via the internet Aisler can be obtained in small numbers. All the necessary manufacturing data are stored at Aisler. The ordering process is very easy.
This wind sensor clearly illustrates the possibilities that DIY projects with open software and open hardware offer. Without the openness, further development and improvement by different people would hardly have been possible.
Properties of the Yachta wind sensor
- Measurement of wind speed 0… 75 kn and wind direction 0… 360 °
- Angular resolution 0.1 °
- Robust mechanics (3 ball bearings)
- Without special metal parts
- All components can be found in specialist shops and hardware stores
- Simple 3D parts
- Weight approx 210g
- Weatherproof and UV-stable
- No cables required for sensor signals
- Digital signal transmission via WiFi
- Supply voltage 6… 25V
- Current consumption 30mA @ 12V (0.36W)
- 12V supply possible via toplight
- ESP8266 for WiFi and data transfer
- Update rate 1 reading per second
- No built-in instrument necessary
- Visualization in OpenPlotter on a laptop, mobile phone or tablet
- Web interface for operation
- No extra software necessary (the display is the display)
- Supports the NMEA 0183 protocol
- Firmware update possible via internet
Firmware properties
Udo firmware
- Web configuration for IP settings port 80
- UDP port 2948
- UDP NMEA0183 telegram MWV
Jukolein firmware
- Web configuration and graphic visualization
- Web server port 80
- UDP port 8080
- TCP port 8080
- UDP / TCP NMEA0183 telegram MWV
- Firmware update OTA via Arduino IDE
Wifi 1000 firmware
- Web configuration and graphic visualization
- Web server port 80
- TCP port 6666
- TCP NMEA0183 telegrams MWV, VWR, VPW
- TCP NMEA0183 customer-specific telegrams INF, WST, WSE
- JSON interface via http://192.168.4.1/json
- Firmware update via internet via GitLab
- Android app
use
The Yachta wind sensor works well in combination with a Raspberry Pi with, for example, OpenPlotter or AVnav to be used. The Raspberry Pi then provides an access point in the WiFi network. The wind sensor connects to the WiFi network and transmits the NMEA0183 data telegrams to the Raspberry Pi. All end devices also connect to the WiFi network and can graphically display the measurement data processed by OpenPlotter or AVnav.
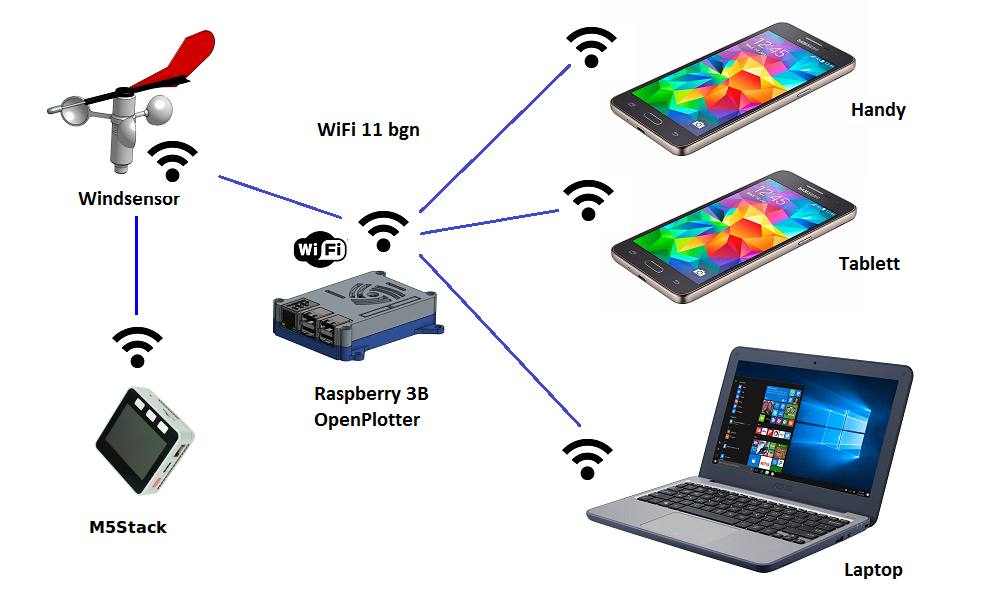
Fig: Connection options
Direct communication from the mobile phone with the wind sensor is also possible if no measurement data processing software is used. A small web server is implemented in the firmware of the wind sensor, which can display the measurement data directly. However, the performance is somewhat lower than with a Raspberry Pi. It makes sense to only connect 2… 3 end devices to the wind sensor at the same time and display data. There is also an Android web app that can be used to display the measurement data. The WebApp is a frameless web browser that displays the content of the website and at the same time ensures that the screen of the mobile phone does not switch off automatically as long as the app is running.
Replica
A Repository at GitLab created. All manufacturing documents can be found there. The mechanical assembly instructions consist of a series of pictures showing the individual steps of assembly. It's easiest if you look at that complete repositories as zip files download The board can be ordered from any board manufacturer with the help of the Gerber data. The easiest way to order circuit boards is via Aisler, since all Gerber data is already stored there. A small series of assembled and programmed boards was launched. If you are interested, you can leave a message here using the contact form.
Caution: If you assemble the board yourself, you should make sure that the output voltage of the DC / DC converter is set to 3.3V before soldering. Otherwise the ESP-12E will be destroyed by overvoltage.
Detailed assembly instructions can be found here: https://open-boat-projects.org/de/zusammenbauanleitung-windsensor-yachta/