Der Bordcontroller überwacht und steuert das Energiesystem einer Yacht

Ziele der Entwicklung
- Erhöhung der Betriebssicherheit
- Erhöhung der Akkumulatorlebensdauer
- Schnelle Ladung der Akkumulatoren
Erhöhung der Betriebssicherheit
Durch die Anzeige der Akkumulatorzustände wird der Betreiber jederzeit über die Verfügbarkeit des Akkumulatorsystems informiert. Ein altersbedingter Defekt des Akkumulators lässt sich durch stetiges Nachlassen der Kapazität diagnostizieren, ein Akkumulatorwechsel ist so rechtzeitig zu planen.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

- OpenSource Seatalk Funk-Fernbedienung für Raymarine Autopiloten
- Basis: Arduino ProMicro und 433MHz Funkmodul
- Einfache 433MHz 4-Kanal-Funksender verwendbar
- Plus/Minus 1 und Plus/Minus 10 Grad Schritte
- Auch mit OLED-Display als Anzeige kombinierbar (z.B. für Windanzeige)
- Einfache Lötbarkeit durch Verwendung konventioneller Bauelemente in Durchstecktechnik
- Programmierung mit Arduino IDE
- Kosten (Platine und Bauteile): ca.
…
weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

- Nachrüstung bei allen Motortypen, da unabhängige Sensoren verwendet werden
- Verwendung günstiger Sensoren
- Messungen diverser Motorparameter
- Durchfluss Kühlwasser (Impuls, YF-S201B)
- Temperatur Kühlkreisläufe (1Wire, DS18B20)
- Temperatur Motorraum (1Wire, DS18B20)
- Motordrehzahl (Impuls, GP2A26 Sharp)
- Drehzahl der Abtriebswelle (Impuls, GP2A26 Sharp)
- Tankfüllstand über Drucksensor
- Motorbetriebsstunden (über Drehzahlerkennung)
- Stromversorgung über 12V Bordnetz
- Datenverarbeitung mit ESP8266
- Datenübertragung per WLAN
- Datenprotokoll NMEA0183, teilweise mit kundenspezifischen Telegrammen
- Datenanzeige über OpenPlotter
- Einfaches Webfrontend zur Bedienung und Anzeige über Handy
- Wasserdichtes Gehäuse
- Einbauort im Motorraum für kurze Leitungen
- Alle Sensoren per Kabel angebunden
- Preis kleiner 120 Euro für Material
- Aktueller Schaltplan
- Platine ist bei Aisler bestellbar
- Aktuelle Software: Quellcode, Binärfile
https://www.segeln-forum.de/thread/71890-motormanagement-diy/… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

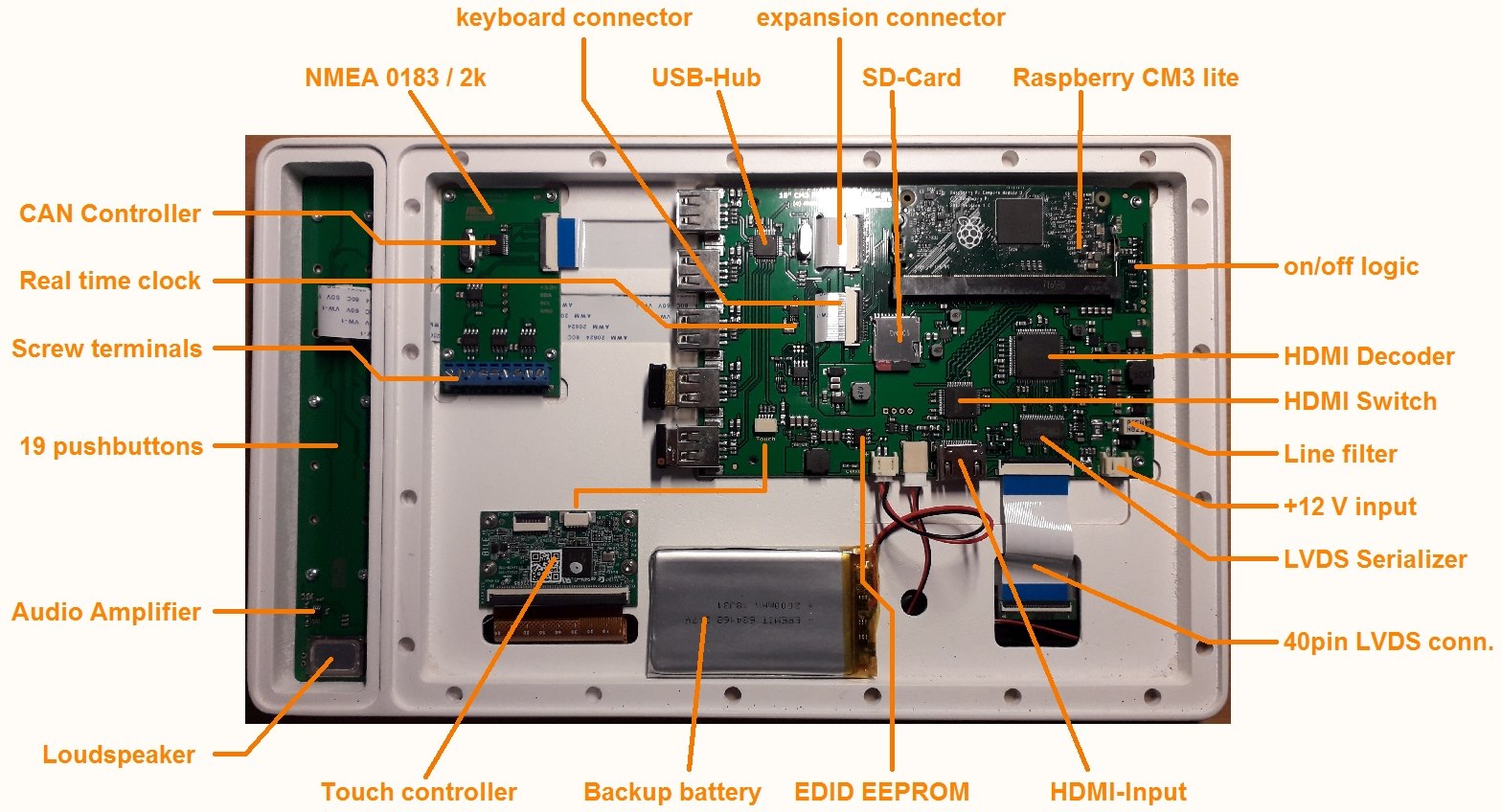
Abb. 10″ Plotter mit Raspberry Pi und OpenCPN
Auf der Boot 2020 in Düsseldorf hat Christian seinen 10″ Plotter auf Raspberry Pi Basis vorgestellt. Dabei wurde der Versuch unternommen eine marinetaugliches Gerät zu erstellen mit dem man auf einem Boot navigieren kann.
Hardware
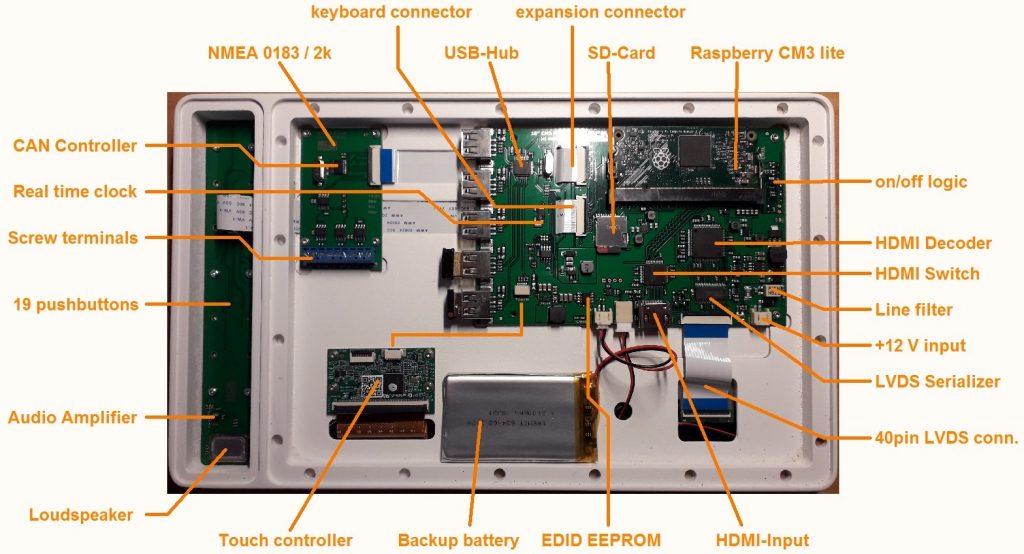
Abb. Komponenten des 10″ Plotters
Als zentrale Recheneinheit wurde das Compute-Modul CM3 light verwendet und eine Reihe weiterer notwendiger Hardwarekomponenten auf einer Basis-Platine untergebracht.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
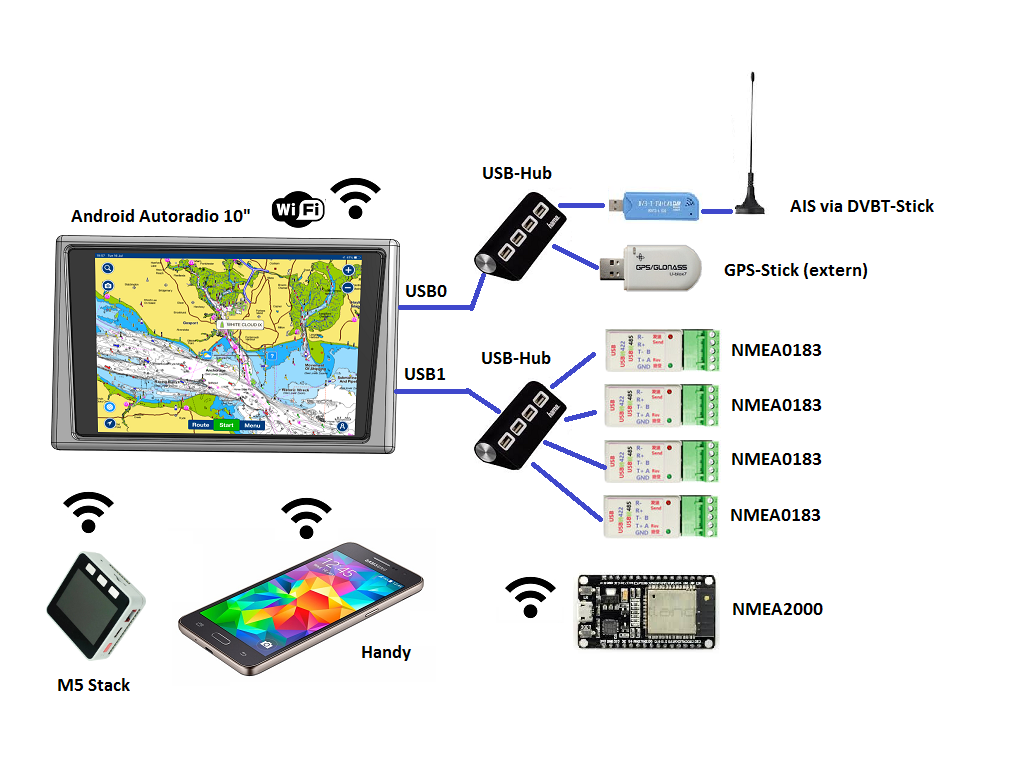
- Basis 2 DIN Android Autoradio
- Touchfähiges 7“ – 10″ Display, 1024 x 600 Pixel, ca. 400 nits
- Touch Funktionstasten
- Cortex A7 QuadCore ARM-Prozessor, 1,2 GHz
- Je nach Modell Android 8, 9 oder 10
- Je nach Modell 1…4 GB RAM
- Je nach Modell 16 / 32 GB ROM
- Kabelgebundenes, leistungsstarkes GPS enthalten
- Bluetooth, WiFi 802.11b/g/n, 2,4 GHz
- CAN-Bus integriert (Lenkradfernsteuerung)
- 12V-Versorgung
- 10…15 W im aktiven Betrieb
- 0,5 W im Standby
- 3 s Aufwachzeit aus Standby
- 2x USB 2.0 (ext.
…
weiterlesen
https://www.segeln-forum.de/thread/72312-abstandssensor-diy/?pageNo=1
- Projekt gestartet in 06/2019
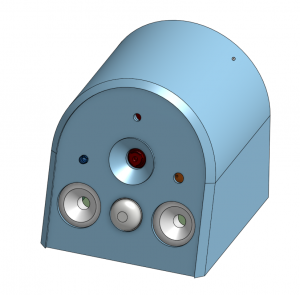
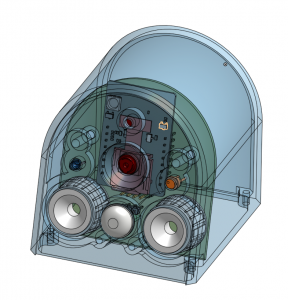
- Projektstart als Ultraschall-Abstandssensor mit zwei Frontsensoren
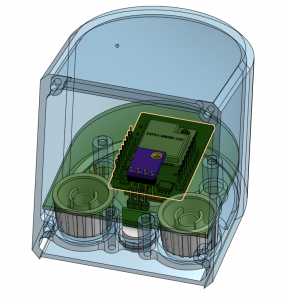
- ESP8266 als Auswerteeinheit mit WLAN
- 12V / 80mA
Nach einigen Diskussionen im Forum kam die Idee, eine Kamera einzusetzen, die in Salingshöhe installiert ist und auf das Vordeck blickt. Dazu gibt es bereits kommerzielle Produkte wie z.B. von Raymarine die CAM100, die aber ca. 700 EUR kostet und sich nur in deren Plotter einbinden lässt.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
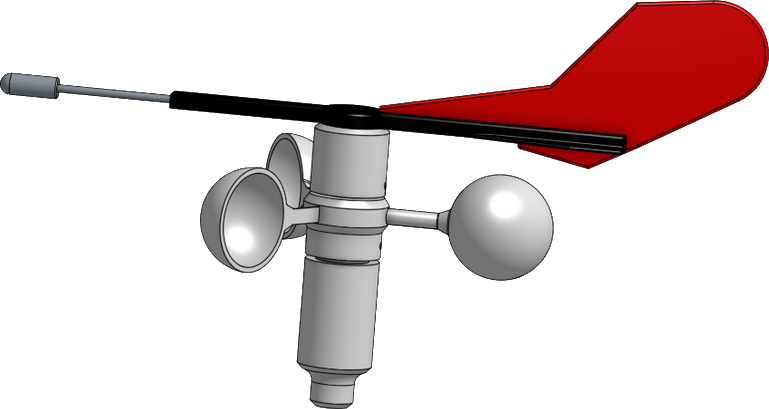
- Messung von Windrichtung und Windspeed
- Robuste Mechanik
- Gewicht <= 250g
- Klein genug, um auf einem 6,60m Segelboot angebaut werden zu können
- Ersatz für einen Windex
- Witterungsfest und UV-stabil
- Sichtbarkeit bei Nacht durch Reflektoren an der Unterseite
- Keine Kabelverlegung für Sensorsignale
- Reine Digitalübertragung und Signalverarbeitung
- 12V Stromversorgung über Toplicht (50mA, 0.5W)
- Übertragung der Daten per WLAN (ESP8266)
- Updaterate: 1-2 Messungen je Sekunde
- Kein Einbauinstrument nötig
- Anzeige in OpenPlotter über Laptop oder auf dem Handy oder Tablett
- Keine Installation von Software nötig (Darstellung auf Webseite im Browser)
- Android-App verfügbar
- Unterstützung gängiger Protokolle wie NMEA 0183 (seriell, TCP/IP)
- Bereits mehr als 30 Systeme nachgebaut und im Einsatz
https://www.segeln-forum.de/thread/67401-windsensor-diy/?pageNo=1… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
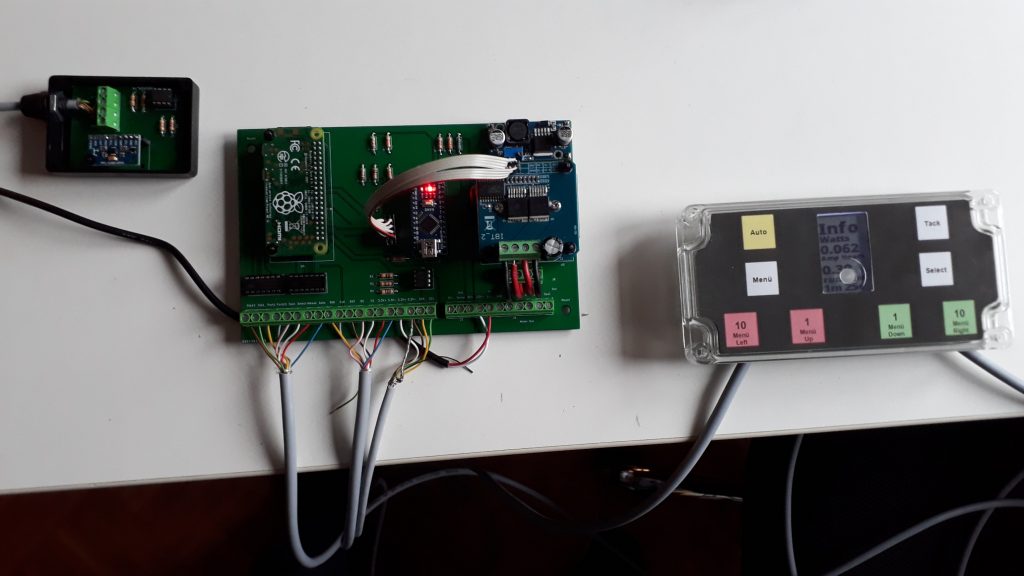
Abb.: PyPilot-Komponenten
Video: PyPilot in Aktion
pyPilot ist eine quelloffene Autopilot Hard- und Software von Sean D’Epagnier.
Eigenschaften:
- automatische Sensor-Kalibration
- Modi
- Kompass
- GPS
- scheinbarer Wind
- wahrer Wind
- SignalK und Nmea0183 Protokoll
- OpenCPN Integration
- geringer Stromverbrauch
user-experiance: http://phoenixketch.blogspot.com
video: https://youtu.be/IMqUmcTbQOE
IBT-2 based motor-controller: https://hackaday.io/project/168592-opencpn-chart-plotter-w-autopilot-and-waypoints
Andreas aus dem Segeln-Forum hat eine Hardwarebasis zum Nachbau des pyPilot erstellt.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
NMEA2000 verdrängt zunehmend NMEA0183 als Standard. Leider ist NMEA2000 ein recht komplexes Protokoll und lange war es kaum möglich eigene Projekte zu realisieren. Das hat sich mit der NMEA2000 Library von Timo Lappalainen geändert (https://github.com/ttlappalainen/NMEA2000).
Die Library unterstützt unterschiedliche Microcontroller, darunter den ESP32. Der ESP32 von Espressiv ist sehr leistungsfähig und dank WLAN und CAN-Bus-Schnittstelle bestens für eigene Projekte geeignet.… weiterlesen