- Restart 08/2018
- other Projects
- Standby since 09/2019
- currently no further activities, as problems of the sensor calibration have not been solved satisfactorily
- current approach distribution:
- AHRS 9-axis digital sensor (compass, gyro, acceleration sensor)
- ESP32 controller unit (possibly a combination of fuzzy control / classic control algorithms)
- Actuator industrial linear unit
- Status: Tests on the position sensor AHRS (Altitude and Heading Reference Sensor)
- Most projects are still in the concept development phase
- There are currently three projects working on the topic:
https://www.segeln-forum.de/thread/69164-pinnenpilot-diy/?pageNo=1
https://www.segeln-forum.de/thread/68916-pypilot/?pageNo=1
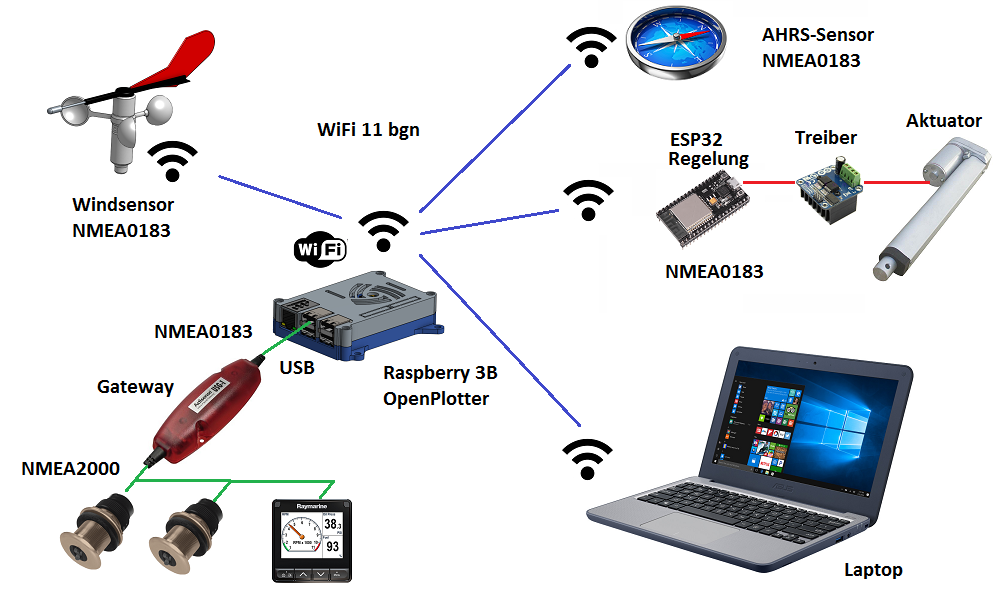
Concept 1 with Raspi as controller and external sensor network
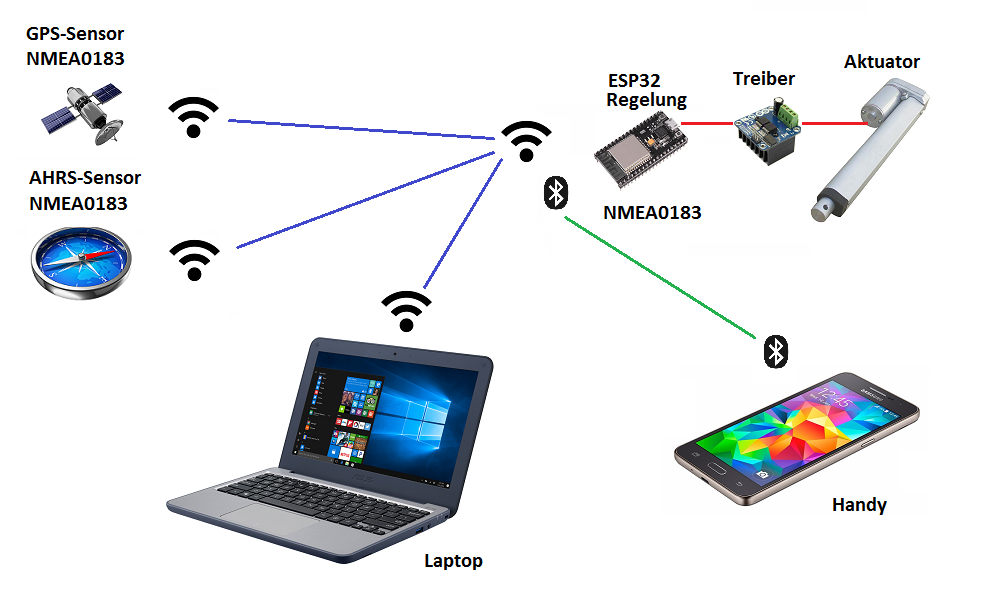
Concept 2 with ESP32 as controller
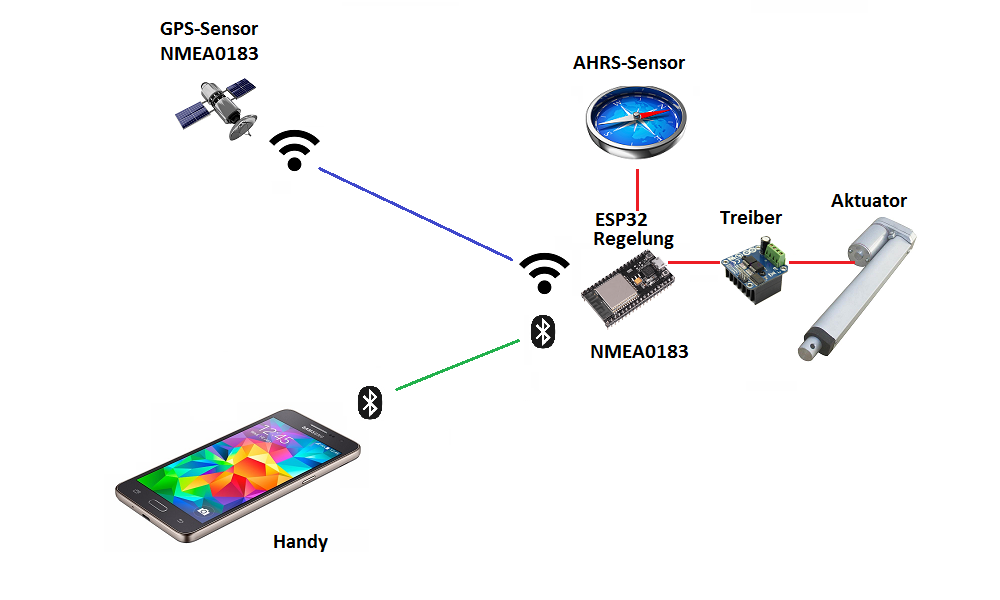
Concept 3 self-sufficient compact tiller pilot
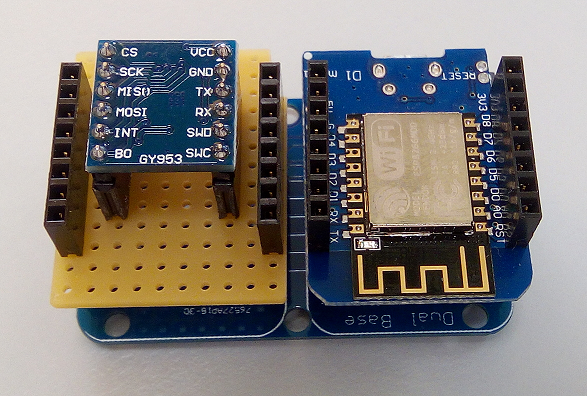
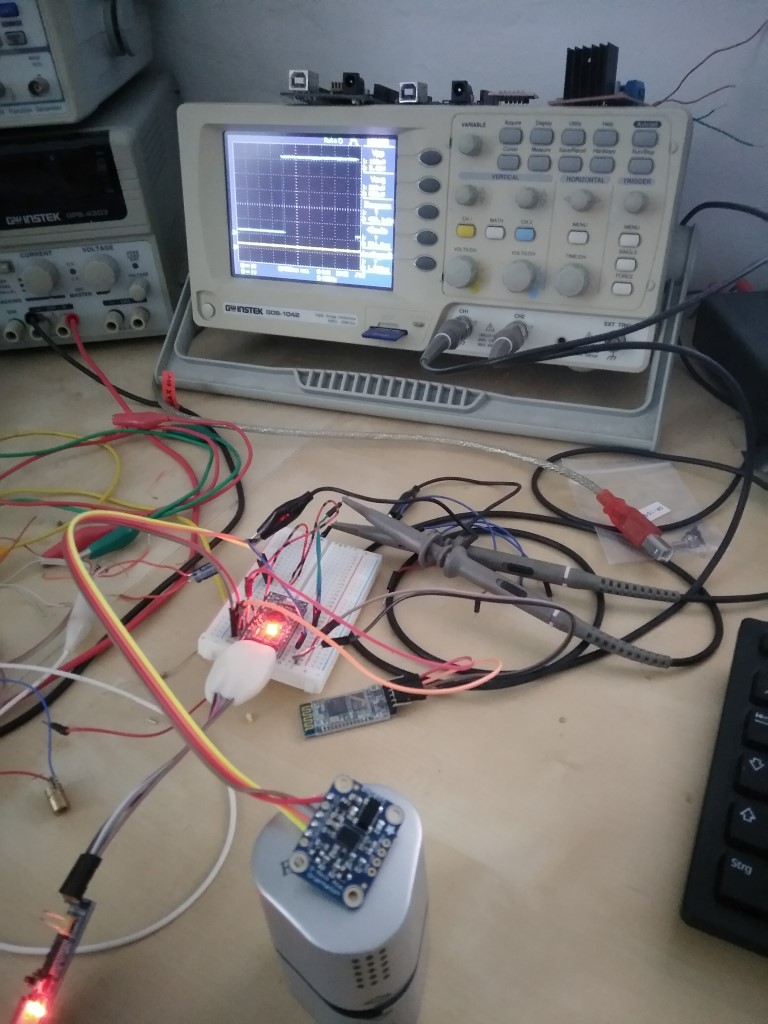
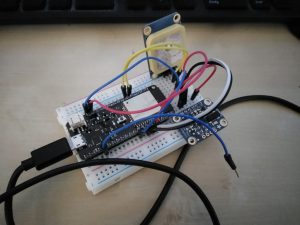
Prototype AHRS GY953 with ESP8266
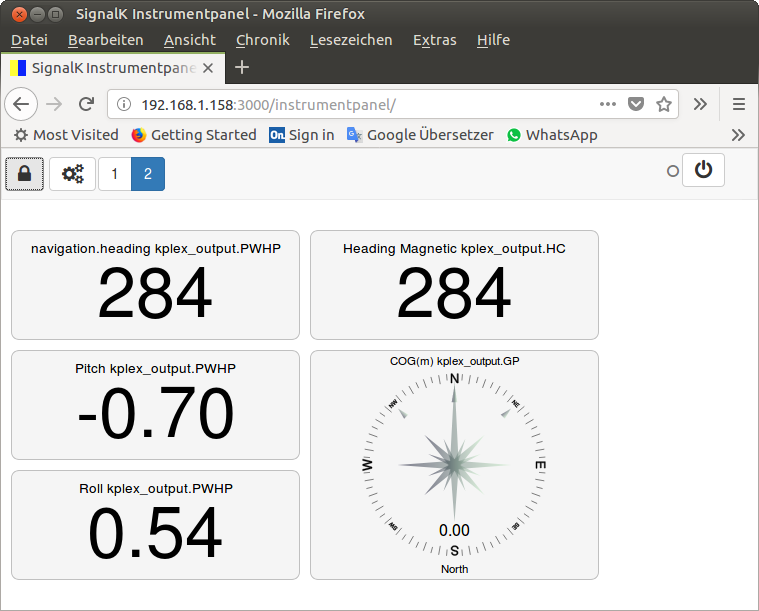
Data of the prototype AHRS in OpenPlotter
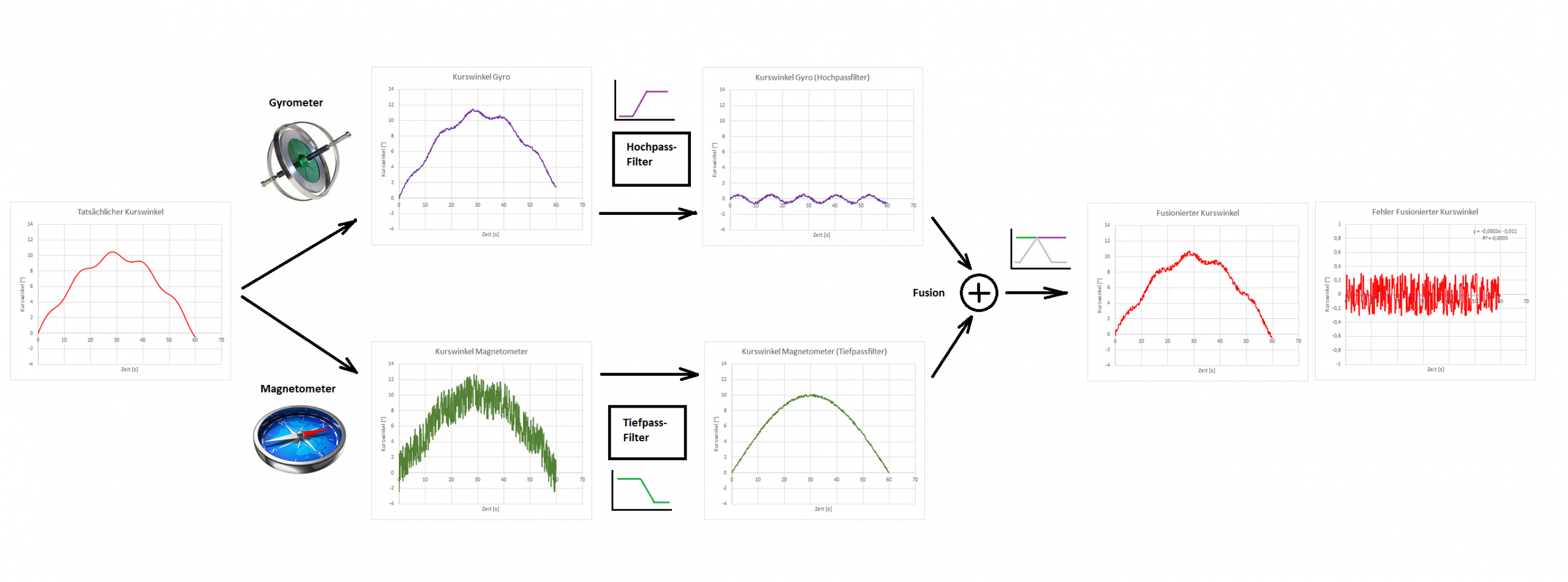 Functional principle of the fusion with complementary filters
Functional principle of the fusion with complementary filters
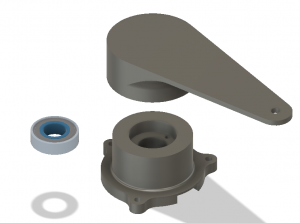



Rudder position sensor made from 3D printed parts by Malte
Prototype with GPS sensor from Malte




Linear actuator disassembled