
https://www.segeln-forum.de/board194-boot-technik/board35-elektrik-und-elektronik/board195-open-boat-projects-org/p2237852-fernbedienung-f%C3%BCr-den-raspberry/#post2237852
Nachdem Christian auf der Boot 2020 im Zusammenhang mit seinem Plotter eine Bluetooth-Fernbedienung vorgestellt hatte gibt es jetzt eine neue IR-Fernbedienung. Es hatte sich gezeigt, dass Bluetooth doch nicht so geeignet für eine Fernbedienung ist, da es erhebliche Probleme unter Linux mit der Verbindungserstellung gab und die Fernbedienung nicht so funktionierte wie man es erwartet.… weiterlesen
https://www.segeln-forum.de/thread/78183-i2c-io-module-f%C3%BCr-signalk-und-zur-bootsautomation/?postID=2231713#post2231713
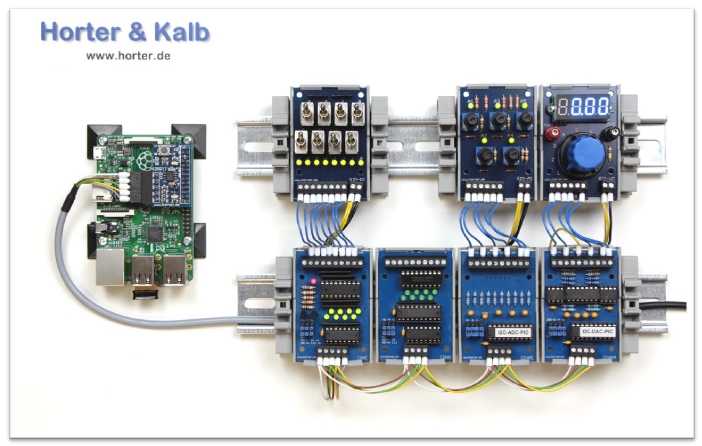
Die I2C-Module der Firma Horter (LxB 65x45mm) lassen sich gut zur Bootsautomation verwenden, da sie an beliebige Mikrocontroller und den Rasperry Pi angeschlossen werden können. Eigentlich ist der I2C-Bus für die Kommunikation zwischen ICs auf einer Platine gedacht. Es gibt aber auch zahlreiche Erweiterungen mit denen die Bussignale verstärkt und elektrisch isoliert werden können, so dass man weitere Entfernungen mit geschirmten Kabeln bis zu 50m überbrücken kann.… weiterlesen
https://www.segeln-forum.de/thread/76840-hubkielsensor-diy/
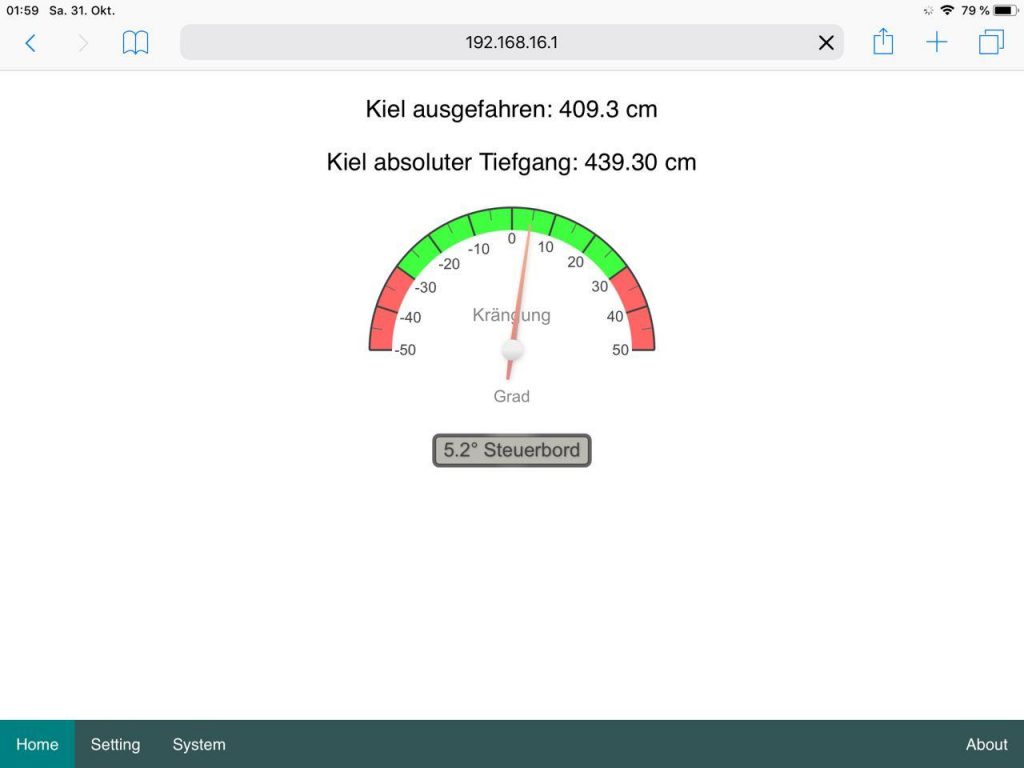
Gerry aus dem Segeln-Forum hat einen Kielsensor gebaut, um die ausgefahrene Tiefe eines aufholbaren Kiels anzuzeigen. Neben der Kieltiefe wird auch die Kängung angezeigt. Die Kieltiefe wird mit Hilfe eines Utraschallsensors gemessen. Dazu ist der Sensor im Inneren des Kielkastens angebracht und sieht von oben auf den abgesenkten Kiel. Die Messdaten können über WLAN z.B.… weiterlesen

Abb. MAIANA AIS Transponder Sende- und Empgangsteil mit fester Antenne (Open Marine)
Peter Antypas hat einen selbst gebauten AIS Klasse B Empfänger / Sender gebaut und auf Github vorgestellt:
https://github.com/peterantypas/ais_transponder
Funktionsweise
Das Gerät vereint folgende Funktionen:
- AIS Klasse B Empfänger / Sender
- 161,975 MHz (Kanal 87B), 162,025 MHz (Kanal 88B)
- 2W Sendeleistung
- Silicon Labs 4463 transceiver ICs
- STM32L412 Mikrocontroller 80MHz
- GPS Quectel L70R Modul, Keramik SMD Antenne (für eigene Standortübermittlung)
- 3.3V UART Ausgang mit 38.4Kbps
- NMEA0183 Datentelegramme
- Updaterate 1 Hz
- 12V / 30 mA
- Offenlegung der Bauunterlagen und der Software auf Github
Der AIS-Transponder besteht aus einem Sende- und Empfangsteil mit fest angebauter Antenne, das über eine geschirmtes Kabel mit einer Adapterbox verbunden ist.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
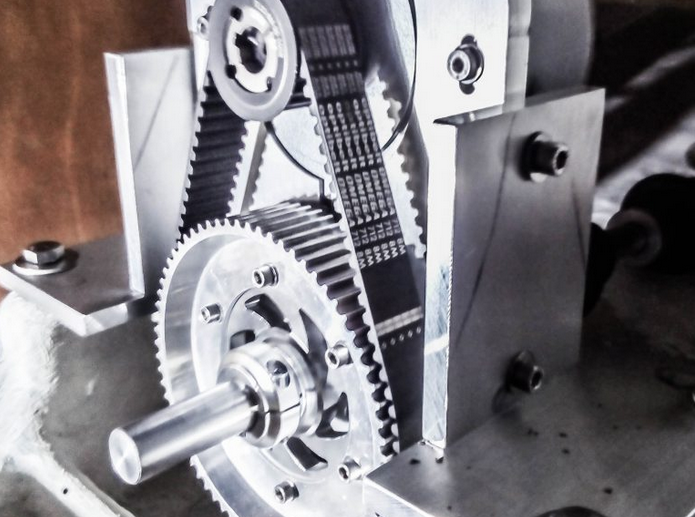
3 kW E-Antrieb für ein 25er Segelboot Make 25 (alle Bilder von sy-colette.com)
PePeSail aus dem Segeln-Forum hat uns angesprochen und auf sein DIY-Projekt zum Einbau eines E-Antriebes in ein 25 Fuß Segelboot hingewiesen, ob wir es hier veröffentlichen wollen. In dem Projekt wurde ein Einbaudiesel gegen einen 3 kW Elektroantrieb getauscht.… weiterlesen

Quelle: www.linguine.eu
Hervorgerufen durch die Corona-Kriese konnten viele Segler keine Sanitäranlagen nutzen und auf sauberes Wasser zum Duschen oder Geschirrspülen zugreifen. Es entstand in einer Diskussion im Segeln-Forum von PePeSail eine Lösung zur Wasseraufbereitung von Oberflächen-Süßwasser wie man es im Binnenbereich in Seen oder Flüssen vorfindet. Auf der Homepage www.linguini.eu hat er das System näher vorgestellt.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
https://www.segeln-forum.de/thread/74840-lora-monitoring-und-alarmserver/
https://github.com/norbert-walter/LoRa-Boat-Monitor
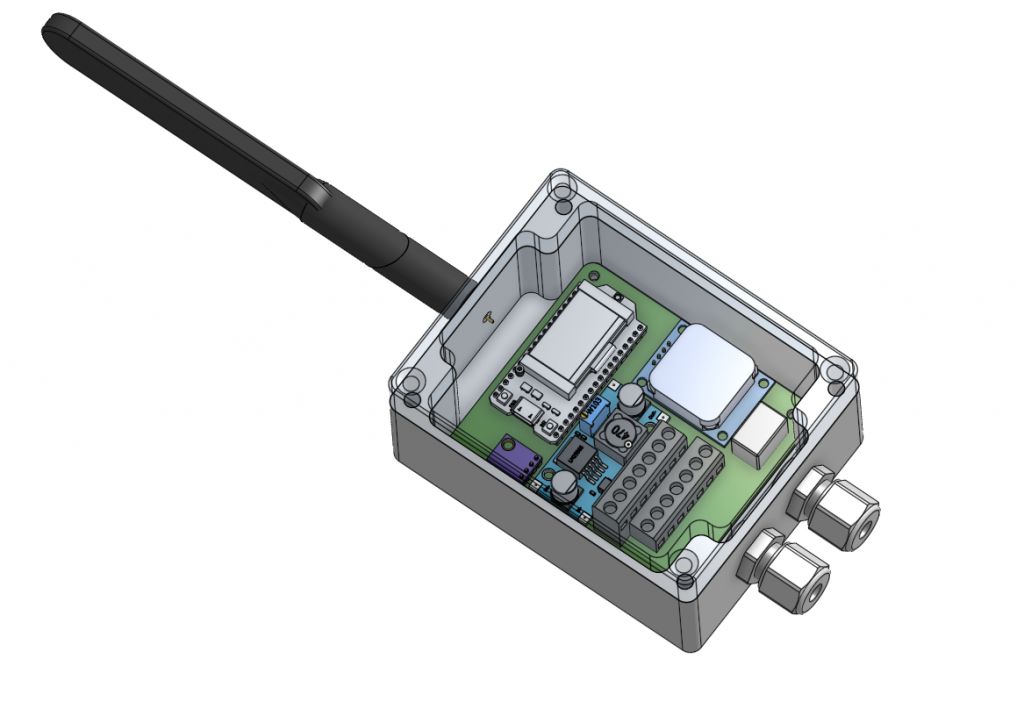
Der LoRa-Bootsmonitor dient zur Überwachung des Bootes bei Abwesenheit. Es werden verschiedene Messwerte kontinuierlich in frei einstellbaren Zeitabständen über die LoRa-Funktechnik (Long Range) in das LoRaWAN weitergeleitet und aufgezeichnet. Die Daten werden vom TTN-Server V3 (The Thinks Network) für Europa in Irland empfangen und zwischengespeichert sowie dann an Ubidots als Web-Frontend weitergeleitet.… weiterlesen
- Neustart 08/2018
- weitere Projekte
- Standby seit 09/2019
- aktuell keine weiteren Aktivitäten, da Probleme der Sensorkalibrierung nicht befriedigend gelöst sind
- aktueller Ansatz Aufteilung:
- AHRS 9-Achs-Digitalsesor (Kompass, Gyro, Beschleunigungssensor)
- Controllereinheit ESP32 (ggf Kombination aus Fuzzyregelung / klassischen Regelalgorithmen)
- Aktuator Industrie-Lineareinheit
- Stand: Tests am Lagesensor AHRS (Altitude and Heading Reference Sensor)
- Projekte befinden sich noch größtenteils in Konzeptfindungsphase
- Derzeit gibt es drei Projekte, die das Thema bearbeiten:
https://www.segeln-forum.de/thread/69164-pinnenpilot-diy/?pageNo=1… weiterlesen

