RayNet ist ein Ethernet-Protokoll und ein Steckverbinder-Standard, der von Raymarine entwickelt wurde, um Systeme mit hoher Datenmenge zu verbinden. Dazu zählen Systeme wie Plotter, Kameras, Radargeräte, Controler für Autopiloten und einige weitere Systeme. Raynet verwendet eine Ethernet-Verbindung mit einer Übertragungsrate von 10/100/1000 Mbit/s, was eine schnelle Übertragung von Daten und eine hochauflösende Videoübertragung in Echtzeit ermöglicht.
Kategorie: openData
SeaTalk NG
SeaTalk NG von Raymarine

Abb.: SeaTalk NG Verbindungstechnik
Mit SeaTalk NG gibt es einen leistungfähigeren Nachfolger für SeaTalk, der auf dem CAN-Bus basiert und eine eingeschränkte Kompatibilität zu NMEA2000 besitzt. Mit der recht übersichtlichen und farbkodierten Anschlusstechnik von SeaTalk NG ist es Raymarine gelungen, eine Abwärtskompatibilität zu SeaTalk bereitzustellen, die auch ältere Geräte unterstützt. Nachteilig ist allerdings der hohe Preis für die proprotäre Anschlusstechnik.… weiterlesen
SeaTalk von Raymarine

Abb.: SeaTalk Verbindungstechnik
SeaTalk ist ein proprietäres serielles Netzwerkprotokoll von Raymarine, das in den 80er Jahren entwickelt wurde und für die Übertragung von Navigationsdaten und anderen Informationen auf Booten eingestzt wird. Dabei werden die Daten als kompakte Binärdaten übertragen. SeaTalk nutzt eine Ein-Draht-Verbindung als Datenleitung für die serielle Datenübertragung, was bedeutet, dass sie Bit für Bit über eine einzige Leitung sowohl gesendet als auch empfangen werden.… weiterlesen
OneNet

NMEA OneNet ist ein auf Ethernet basierendes Übertragungsverfahren. Mit NMEA OneNet, wie der Name schon sagt, wird der Versuch unternommen, verschiedenste Übertragungsverfahren wie NMEA0183 und NMEA2000 in einem Protokoll zu bündeln und so die Kompatibilität zu alten Übertagungsverfahren zu wahren. Zusätzlich werden neue Protokolle hinzugefügt mit denen auch große Datenmengen wie Bild- und Kartenübertragung möglich sind.
NMEA2000

Abb.: NMEA2000 Verbindungstechnik (Busse Yachtshop)
NMEA2000 (National Marine Electronics Association 2000) ist ein Bussystem für die Kommunikation in Booten. Es wurde entwickelt, um eine einheitliche Schnittstelle für die Übertragung von Daten von elektronischen Geräten in Booten bereitzustellen.
Funktionsprinzip
NMEA2000 ist ein Bussystem, das für die Übertragung von Daten zwischen elektronischen Geräten in Booten konzipiert ist.… weiterlesen
NMEA0183
NMEA 0183 ist ein Standard für serielle Datenübertragung in der Schifffahrt. Es definiert ein Format für die Übertragung von GPS-Informationen, Geschwindigkeits- und Kursdaten, sowie anderen Navigationsdaten zwischen Navigationsgeräten und anderen elektronischen Geräten auf Booten.
Vorteile von NMEA 0183:
- Verbreitet: NMEA 0183 ist ein weit verbreiteter Standard, der von vielen alten Geräten unterstützt wird
- Einfache Implementierung: Es ist einfach, ein Gerät für NMEA 0183 zu entwickeln, da es einfache Protokolle und eine gut dokumentierte Spezifikation gibt.
NMEA2000 für NASA / CLIPPER Duet Echolot/Log
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
![]()
Abb.: NASA/Clipper Duet Echolot/Log
In diesem Artikel soll es darum gehen, wie man ein NASA/Clipper Duet Echolot/Log so umbauen kann, dass das Gerät NMEA2000 Daten ausgibt. Dieses Dokument basiert auf dem DIY-Project von Sönke und wurde um einige Zusatzinformationen ergänzt. Das NASA/Clipper Duet Echolot/Log ist eigentlich ein Gerät ohne Bus-Anschluss und arbeitet autark mit zwei getrennten Sensoren.… weiterlesen
Maritime Data Server (MDS)
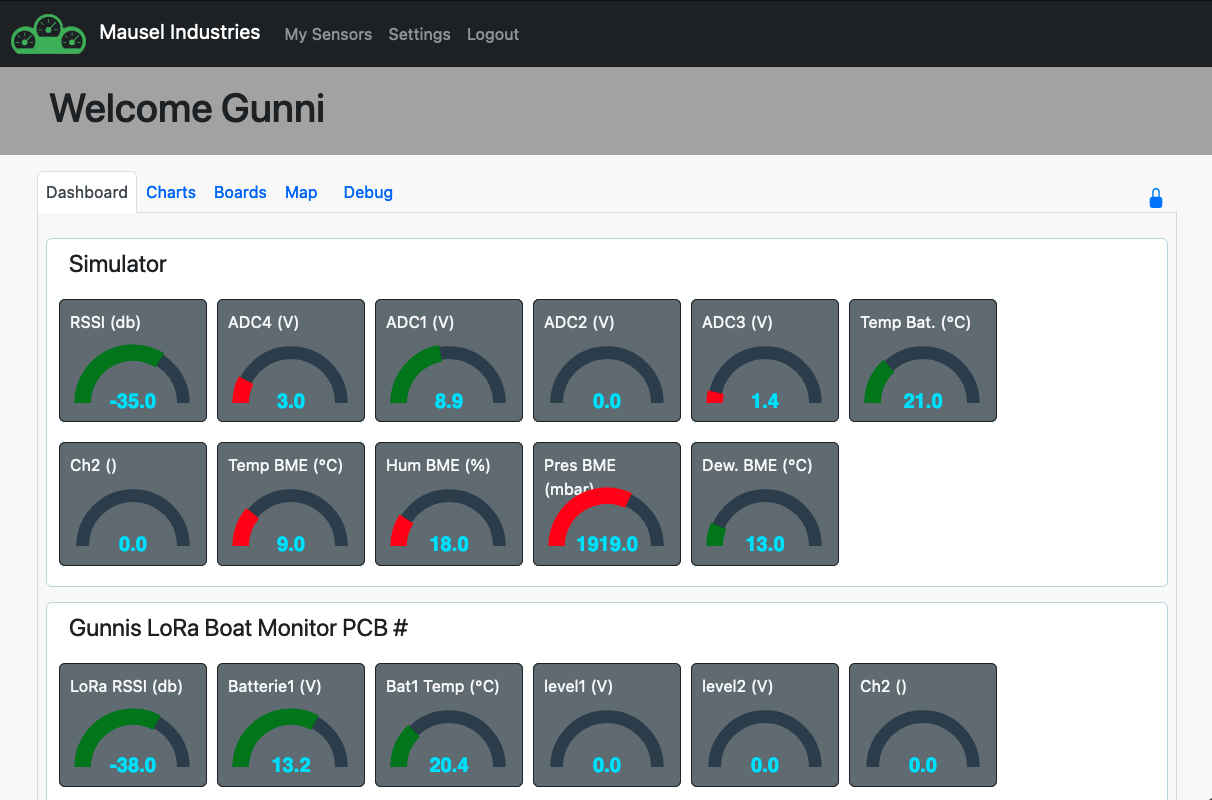
Abb.: MDS Dashboard
Der MDS – Maritime Data Server wurde entwickelt, um Boots-Daten zu speichern und darzustellen.
Welche Daten lassen sich speichern?
Bei der Entwicklung wurde Wert darauf gelegt, ein möglichst flexibles System zu haben. Aktuell vorbereitet ist der MDS für Temperaturen, Spannungen, GPS Werte, Druck und Luftfeuchtigkeit, Digitalwerte usw. Weitere Daten können durch definieren von Sensor-Typen in der Datenbank erstellt werden.… weiterlesen
Datenintegration in Ubidots
Der Ablauf der Konfiguration für die Datenintegration in Ubidots sieht folgendermaßen aus:
- Anmeldung bei Ubidots
- Plugin für Webhook bei Ubidots erstellen
- Webhook bei TTN V3 einrichten
- Prüfung der Webhook-Funktionalität
Anmeldung bei Ubidots und Plugin für Webhook einrichten
Um die empfangenen LoRa-Daten von TTN nach Ubidots übertragen zu können, müssen wir für den Datenempfang ein Plugin für einen Webhook in Ubidots einrichten.… weiterlesen
Hardwarebasis für AVnav und OpenPlotter
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
Raspberry Pi
Als Hardwarebasis für AVnav und OpenPlotter dient hauptsächlich der Raspberry Pi. Er ist ein Kleinstrechner im Scheckkarten-Format. Es gibt ihn in mehreren Varianten, wobei wir uns hier ausschließlich auf den Raspberry Pi 4B konzentrieren. Von den älteren Modellen ist lediglich der Raspberry Pi 3B noch interessant.… weiterlesen