- Neustart 08/2018
- weitere Projekte
- Standby seit 09/2019
- aktuell keine weiteren Aktivitäten, da Probleme der Sensorkalibrierung nicht befriedigend gelöst sind
- aktueller Ansatz Aufteilung:
- AHRS 9-Achs-Digitalsesor (Kompass, Gyro, Beschleunigungssensor)
- Controllereinheit ESP32 (ggf Kombination aus Fuzzyregelung / klassischen Regelalgorithmen)
- Aktuator Industrie-Lineareinheit
- Stand: Tests am Lagesensor AHRS (Altitude and Heading Reference Sensor)
- Projekte befinden sich noch größtenteils in Konzeptfindungsphase
- Derzeit gibt es drei Projekte, die das Thema bearbeiten:
https://www.segeln-forum.de/thread/69164-pinnenpilot-diy/?pageNo=1
https://www.segeln-forum.de/thread/68916-pypilot/?pageNo=1
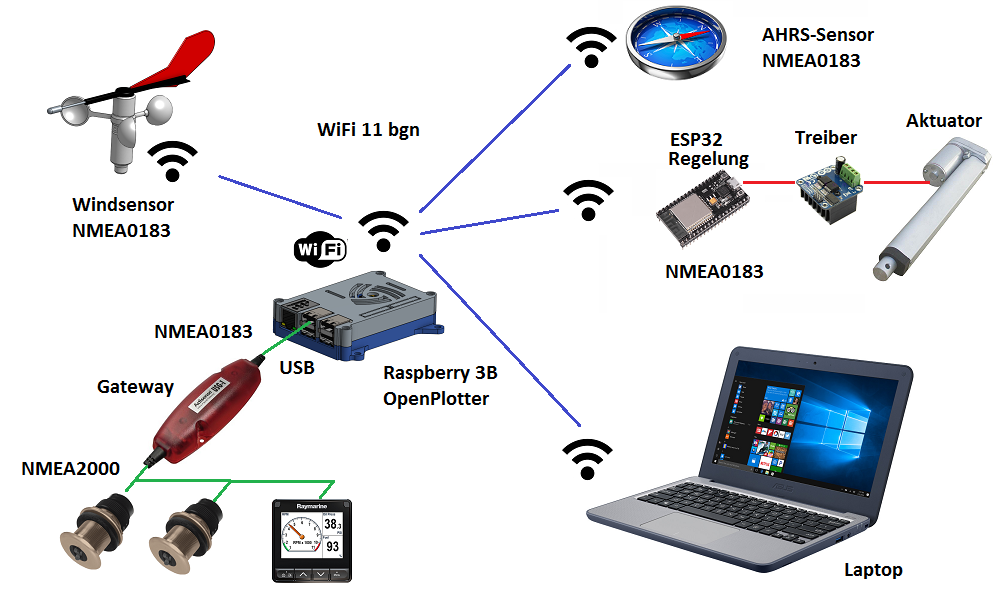
Konzept 1 mit Raspi als Controller und externen Sensornetzwerk
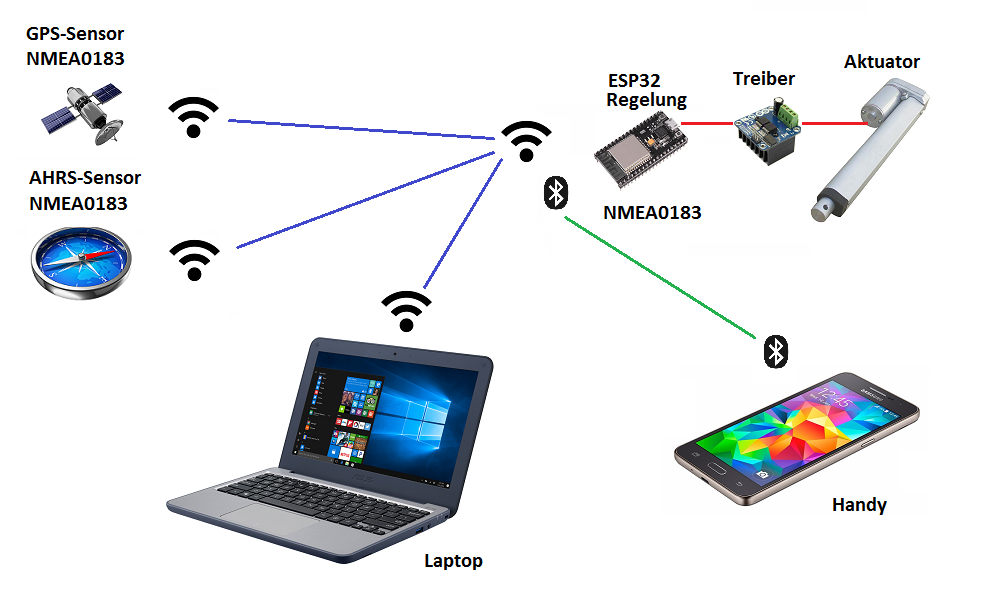
Konzept 2 mit ESP32 als Controller
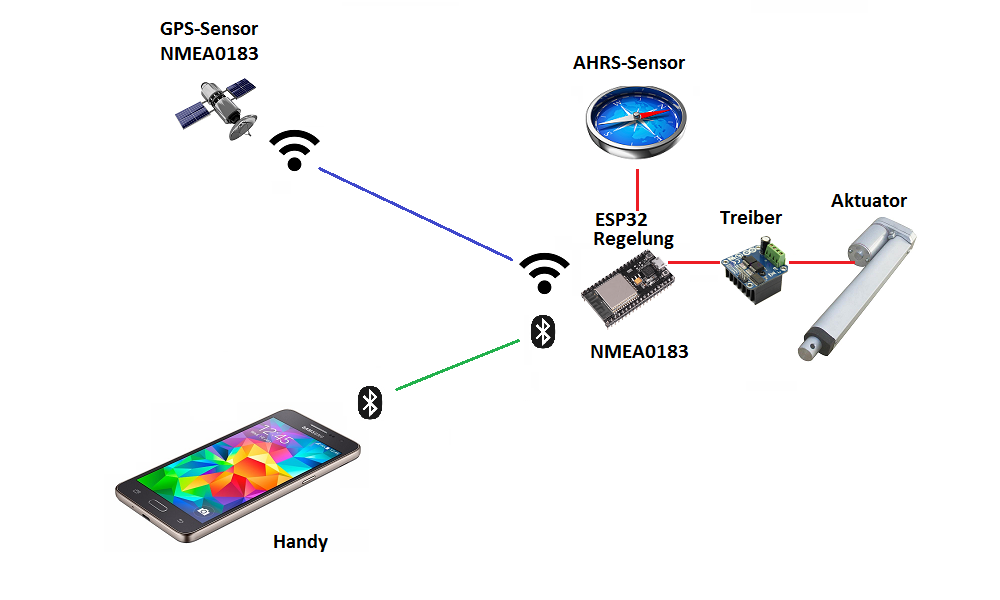
Konzept 3 autarker kompakter Pinnenpilot
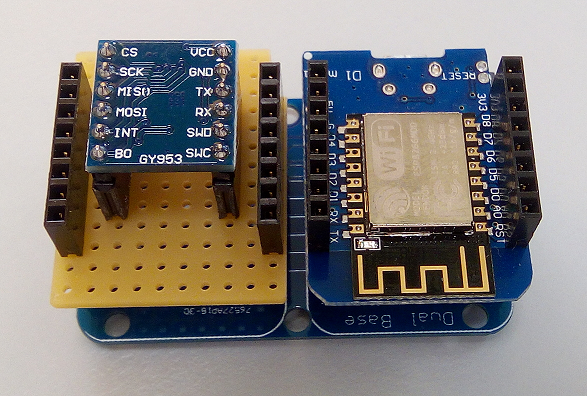
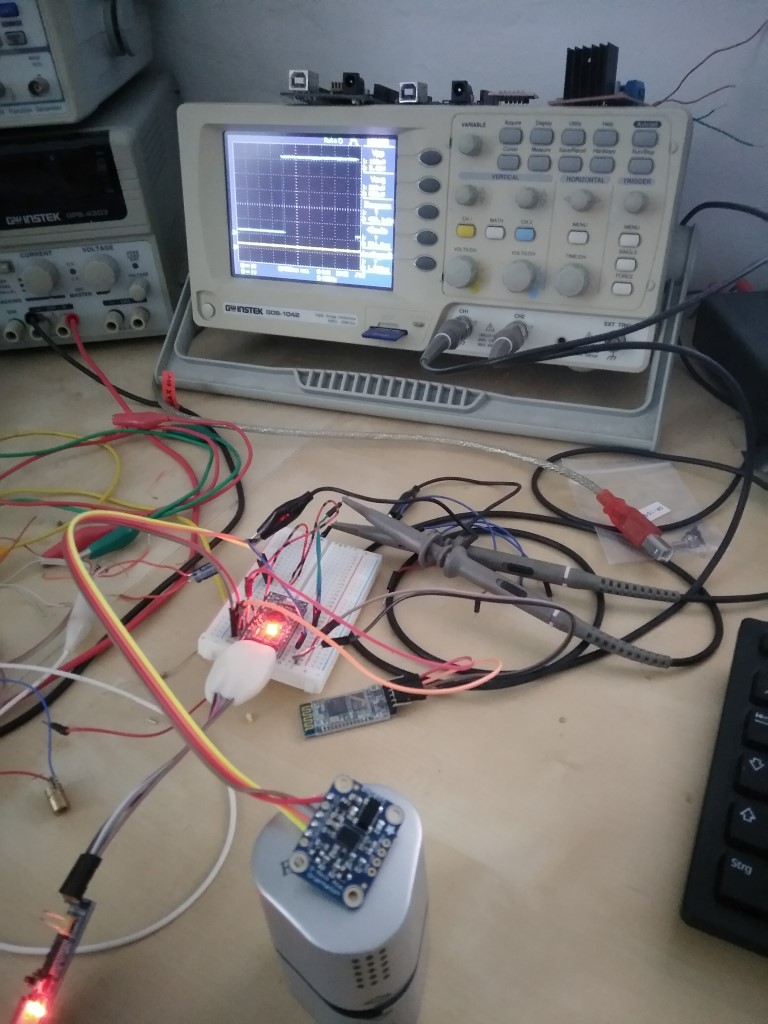
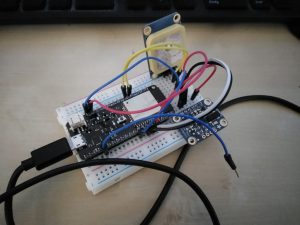
Prototyp AHRS GY953 mit ESP8266
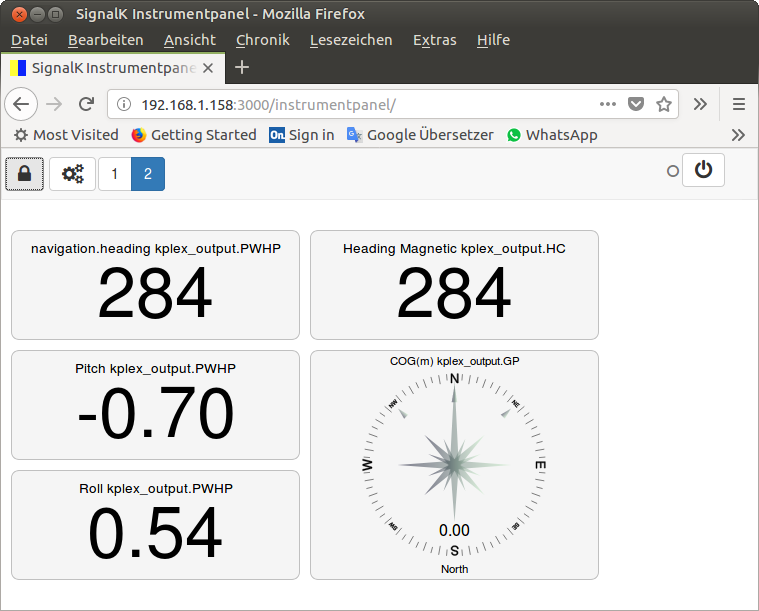
Daten des Prototypen AHRS in OpenPlotter
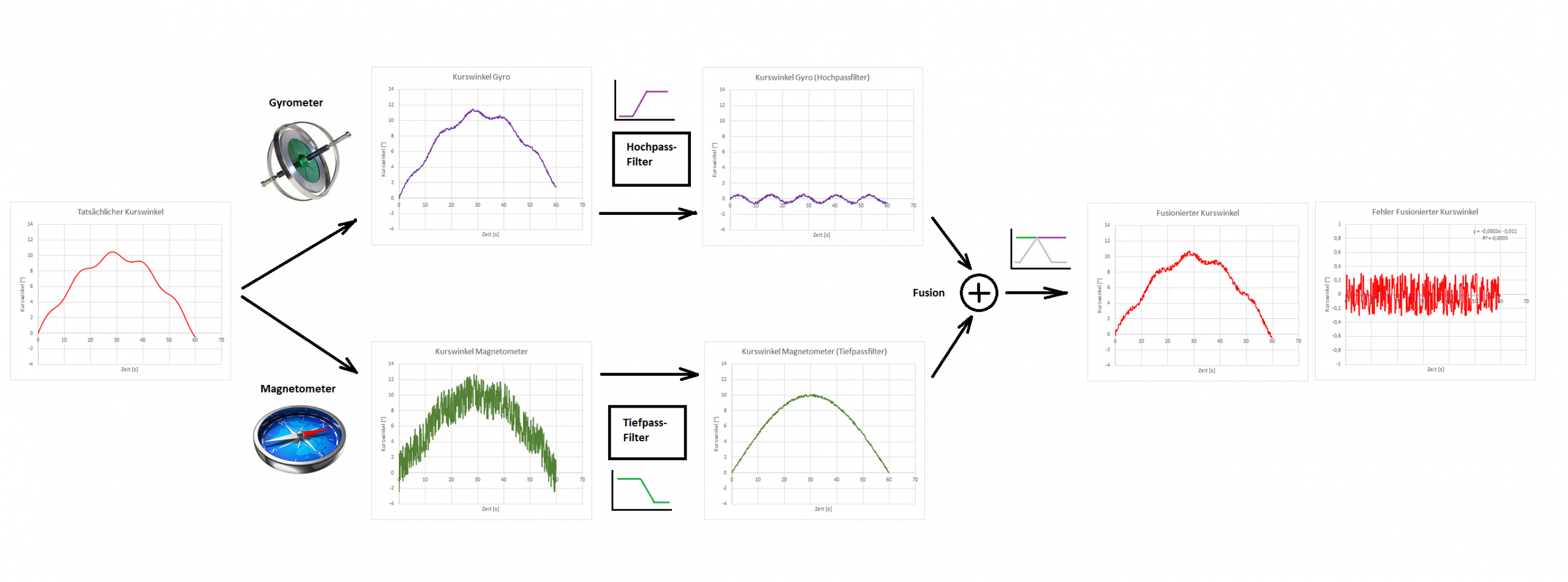 Funktionsprinzip der Fusion mit Komplementärfiltern
Funktionsprinzip der Fusion mit Komplementärfiltern
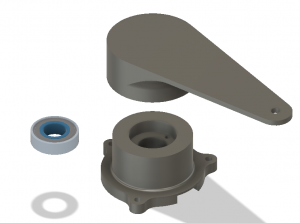



Ruderlagengeber aus 3D gedruckten Teilen von Malte
Prototyp mit GPS-Sensor von Malte




Linearaktuator zerlegt