Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
Disclaimer: Die Beschreibungen der Verdrahtung und der Pinbelegungen entsprechen dem, was ich in meinem Boot vorgefunden habe. Deshalb muss man, wenn man das Interface nachbauen möchte, sicherstellen, dass die Verdrahtungen und Pinbelegungen auf dem eigenen Boot identisch sind oder das Interface entsprechend anpassen. Die gesamte Beschreibung dieser Lösung ist in einem experimentellen Zustand und kommt ohne jegliche Gewährleistung. Änderungen an der Verkabelung des Bootes oder der elektrischen und elektronischen Gegebenheiten können zu Schäden oder kritischen Situationen führen. Das geschieht auf eigene Gefahr.
Inhaltsverzeichnis
Allgemeines
Die Basis-Installation eines Volvo Penta-Motors (Motoren D1 und D2) mit EVC besteht aus verschiedenen Sensoren am Motor, die an das EVC/MDI (electronic vessel control/motor data interface) angeschlossen sind. Diese Daten werden vom MDI über einen CAN-Bus an das Drehzahlinstrument geliefert. Häufig gibt es nur den Drehzahlmesser mit einem kleinen LCD-Display um Daten anzuzeigen. Weitere Instrumente können aber erworben und hinter dem Drehzahlmesser über den sog. Easy-Link angeschlossen werden.
Die Drehzahl wird kontinuierlich angezeigt. Weiter Werte, wie etwa Kühlwassertemperatur und Ladespannung werden nur im Fehlerfall alarmiert, aber nicht durchgehend angezeigt. Das hier beschriebene Interface verbindet den CAN-Bus des Motors mit einem NMEA2000-Bus. Dabei werden die Informationen im VP-CAN-Bus die als J1939-Datagamme vorliegen gelesen, ausgewertet, und als NMEA2000-Datagramme auf den NMEA2000-Bus geschrieben. Die bisher implementierten Daten sind
- Motordrehzahl
- Ladespannung
- Kühlwassertemperatur
- Motorstunden
Im NMEA2000-Bus können die Informationen z.B. von einem Plotter angezeigt und mit Warnleveln versehen werden.
Bei einer Überführung meines Bootes über die Unterems Richtung DEK hat mich das vor sehr großen Problemen bewahrt. Durch die vielen Sedimente in der Ems war der äußere Kühlkreis zunehmend verstopft. Über meinen Plotter (MFD) konnte ich den Temperaturanstieg frühzeitig bemerken, und entsprechend reagieren. Ohne das Interface und die Anzeige im MFD wäre irgendwann der Alarm gekommen, und dann hätte ich kaum noch Handlungsoptionen gehabt, dass es keine Möglichkeiten gegeben hätte, festzumachen oder zu ankern. Ich hätte mit dem Risiko der Überhitzung der Maschine weiterfahren müssen.
Bestandteile
Das Volvo Penta – N2K Interface besteht aus Hardware- und Softwarekomponenten.
Hardware
Um das Interface physisch mit dem VP-CAN-Bus des Motors zu verbinden, benötigt man ein Adapterkabel mit Y-Verzweigung. Die Verbindung des Kabels vom MDI zum Drehzahlmesser sind sog. 6-polige ‚Deutsch-Stecker‘, male und female. ( z.B. https://www.kabelschuhe-shop.de/KALI-1206-DEUTSCH-DT-Steckverbinder-Set-6-polig). Man verbindet die sechs Pins des Steckers mit denen der Buchse. Zusätzlich leitet man 12v+, GND Can high und CAN low aus.
Um das Interface physikalisch mit dem N2K-Bus (entweder Seatalk NG oder NMEA2000) zu verbinden, benötigen man ebenfalls ein geeignetes Kabel. Mein Interface ist mit einem Raymarine Seatalk NG-Netzwerk verbunden. Also habe ich ein STNG-Standard-Spurkabel durchgeschnitten, um ein Kabel mit einem Stecker und einem offenen Ende zu bekommen.
CAN-Bus-Transceiver
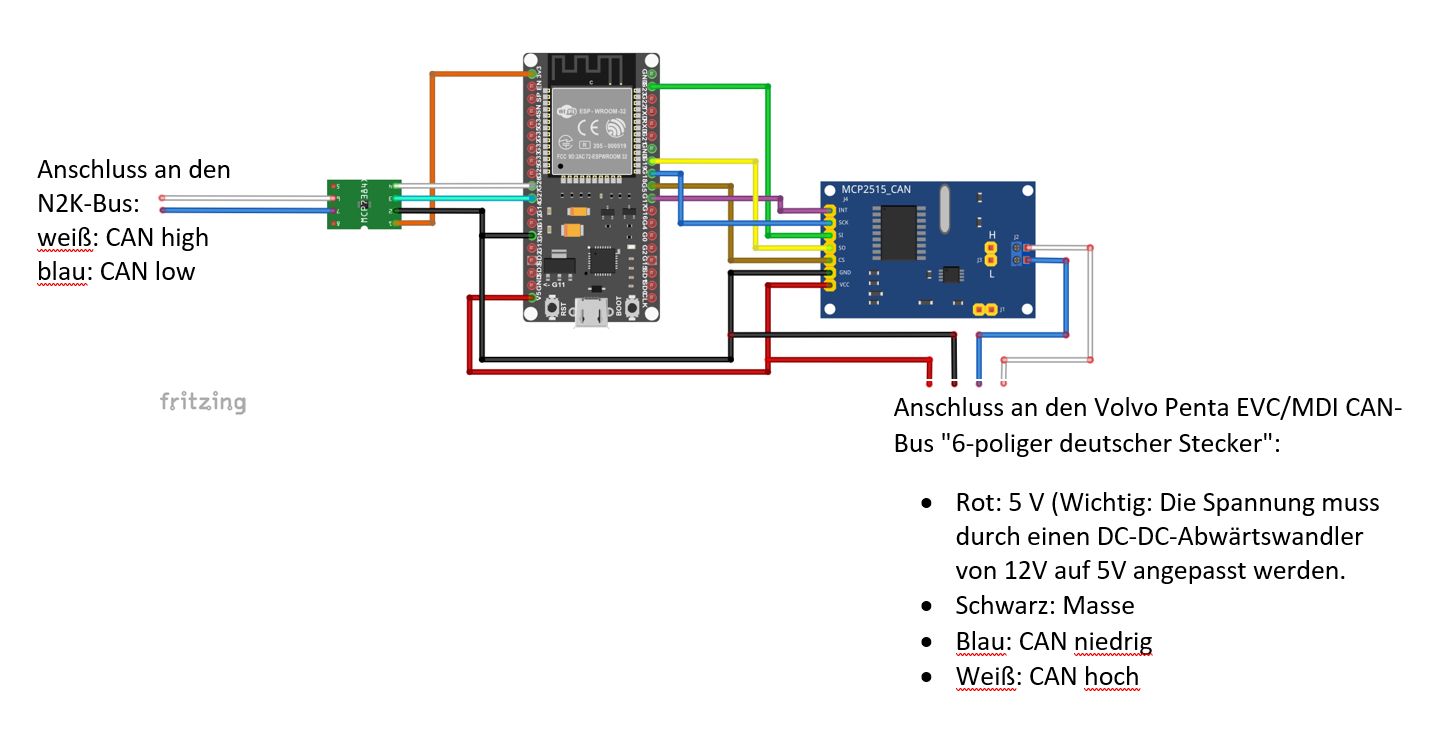
Um das Interface auf Protokollebene mit dem CAN-Bus des Motors zu verbinden, verwende ich einen SPI-MCP2515-CAN-Transceiver-TJA1050. Dieser Transceiver wird von der MCP_CAN_lib von Cory J. Fowler gesteuert.
Um das Interface auf der Protokollebene an den N2K-Bus anzuschließen, verwende ich einen Waveshare SN65HVD230. Dieser Transceiver wird von der NMEA2000-Bibliothek von Timo Lappalainen gesteuert.
Da der ESP32 eine Spannungsversorgung von 5V benötigt und der CAN-Bus mit 12V versorgt wird, benötigt man zusätzlich einen Stepdown-Converter auf 5V.
Software
Den Code gibt es hier: https://github.com/buhhe/VolvoPenta-N2K_Interface
Er basiert auf Code von:
– Timo Lappalainen https://github.com/ttlappalainen
– Andreas Koritnik https://github.com/AK-Homberger
– Cory J. Fowler https://github.com/coryjfowler
Diese Bibliotheken werden benötigt:
https://github.com/coryjfowler/MCP_CAN_lib
https://github.com/ttlappalainen
Volvo Penta – N2K Interface: Vorgehen
- Besorgen Sie sich die Hardwarekomponenten
- ESP32 Entwicklungsmodul
- MCP2515-CAN-Transceiver
- SN65HVD230 CAN-Sender/Empfänger
- DC-DC Abwärtswandler 5V
- Ein Paar 6-polige „Deutsch-Stecker“ (Stecker/Buchse)
- Erstellen Sie das Y-Verzweigungskabel. (Siehe Seite 3)
- Führen Sie die Verkabelung durch. (Siehe Seite 4)
- Besorgen Sie die benötigten Bibliotheken.
- Kompilieren und flashen Sie die Software.
- Installiere alles auf deinem Boot.
- Viel Spaß!
Anschluss des Interface an den VP CAN-Bus
Der Drehzahlmesser mit integrierter LCD-Anzeige wird über einen Kabelbaum und einen 6-poligen Deutsch-Stecker mit dem MDI des Motors verbunden. Die Verbindung heißt bei Volvo Penta „Multi-Link“. Die Daten werden als CAN-basierte J1939-Datagramme bereitgestellt.


Für den Anschluss an den Bus benötigten man ein Y-Verzweigungskabel. Das Kabel wird zwischen dem Stecker des Kabelbaums und dem Tachometer angeschlossen.



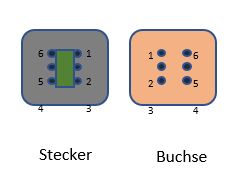
Pin-Belegung:
- 1 nicht belegt
- 2 CAN low
- 3 nicht belegt
- 4 Minus
- 5 CAN high
- Plus, 5V
Verkabelung
Diskussionsbereich: https://www.segeln-forum.de