
Abb. MAIANA AIS Transponder Sende- und Empgangsteil mit fester Antenne (Open Marine)
Peter Antypas hat einen selbst gebauten AIS Klasse B Empfänger / Sender gebaut und auf Github vorgestellt:
https://github.com/peterantypas/ais_transponder
Funktionsweise
Das Gerät vereint folgende Funktionen:
- AIS Klasse B Empfänger / Sender
- 161,975 MHz (Kanal 87B), 162,025 MHz (Kanal 88B)
- 2W Sendeleistung
- Silicon Labs 4463 transceiver ICs
- STM32L412 Mikrocontroller 80MHz
- GPS Quectel L70R Modul, Keramik SMD Antenne (für eigene Standortübermittlung)
- 3.3V UART Ausgang mit 38.4Kbps
- NMEA0183 Datentelegramme
- Updaterate 1 Hz
- 12V / 30 mA
- Offenlegung der Bauunterlagen und der Software auf Github
Der AIS-Transponder besteht aus einem Sende- und Empfangsteil mit fest angebauter Antenne, das über eine geschirmtes Kabel mit einer Adapterbox verbunden ist.… weiterlesen
AIS Radar Pro empfängt die AIS-Meldungen vom angeschlossenen AIS-Empfänger (Receiver), dekodiert die enthaltenen Informationen und zeigt diese grafisch und in Textform an. Aus den erhaltenen Positions- und Geschwindigkeitsdaten ermittelt AIS Radar mögliche Kollisionsgegner, den Abstand in Seemeilen und Minuten zur dichtesten Annäherung an den Kollisionsgegner, sowie Ort und Zeitpunkt einer möglichen Kollision. AIS Radar Pro folgt dem einfachen RG Marine Prinzip: Alles, was ROT leuchtet, ist gefährlich.… weiterlesen

Abb.: Ultraschall Füllstandsmessung
Die Idee des Füllstandsensors ist im Segeln-Forum durch mehrere Segler entstanden. Andreas hat eine Prototypen aufgebaut und an verschiedenen Objekten getestet. Durch Verwendung käuflicher Fertigmodule ist ein einfacher Nachbau gegeben. Der Ultraschall-Sensor erfasst Flüssigkeitsstände in einem Tank und sendet NMEA0183-Telegramme per WLAN an das Bordnetzwerk. Diese können dann z.B. in AVnav oder OpenCPN visualisiert werden.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
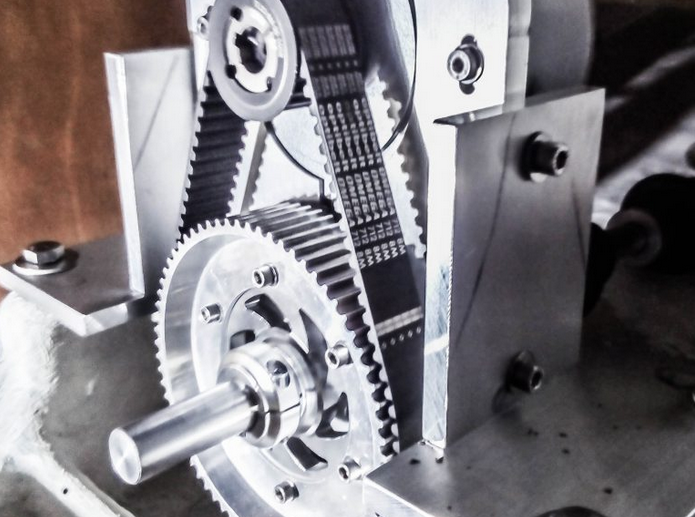
3 kW E-Antrieb für ein 25er Segelboot Make 25 (alle Bilder von sy-colette.com)
PePeSail aus dem Segeln-Forum hat uns angesprochen und auf sein DIY-Projekt zum Einbau eines E-Antriebes in ein 25 Fuß Segelboot hingewiesen, ob wir es hier veröffentlichen wollen. In dem Projekt wurde ein Einbaudiesel gegen einen 3 kW Elektroantrieb getauscht.… weiterlesen

Quelle: www.linguine.eu
Hervorgerufen durch die Corona-Kriese konnten viele Segler keine Sanitäranlagen nutzen und auf sauberes Wasser zum Duschen oder Geschirrspülen zugreifen. Es entstand in einer Diskussion im Segeln-Forum von PePeSail eine Lösung zur Wasseraufbereitung von Oberflächen-Süßwasser wie man es im Binnenbereich in Seen oder Flüssen vorfindet. Auf der Homepage www.linguini.eu hat er das System näher vorgestellt.… weiterlesen
Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
https://www.segeln-forum.de/thread/74840-lora-monitoring-und-alarmserver/
https://github.com/norbert-walter/LoRa-Boat-Monitor
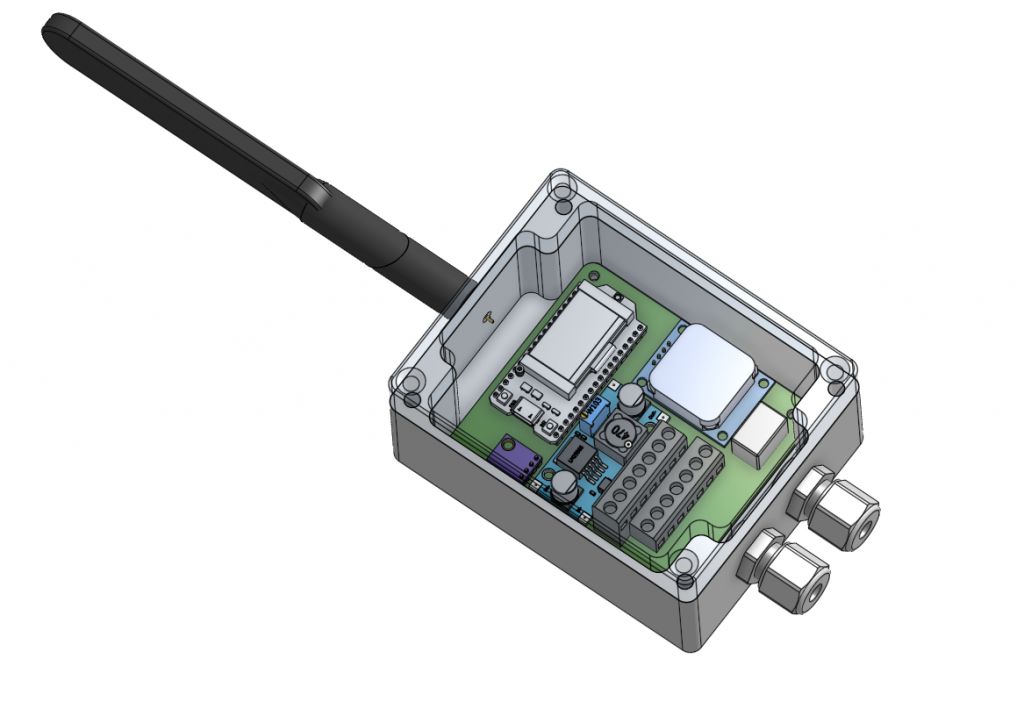
Der LoRa-Bootsmonitor dient zur Überwachung des Bootes bei Abwesenheit. Es werden verschiedene Messwerte kontinuierlich in frei einstellbaren Zeitabständen über die LoRa-Funktechnik (Long Range) in das LoRaWAN weitergeleitet und aufgezeichnet. Die Daten werden vom TTN-Server V3 (The Thinks Network) für Europa in Irland empfangen und zwischengespeichert sowie dann an Ubidots als Web-Frontend weitergeleitet.… weiterlesen
Vorab ein paar wichtige Hinweise, die Sie unbedingt beachten sollten.

- Vollständig webbasierte Navigationssoftware für Boote
- Kartendarstellung webbasiert auf Kachelbasis wie bei Google Maps
- Läuft als Server auf Raspi
- Auch als eigenständige Android App verfügbar
- Features:
- Navigation auf kleinen Geräten wie Handy oder Tablet möglich
- Auf 7″-Geräte optimiert
- Auf 10″-Geräten ideal einsetzbar z.B. Android Autoradio (siehe hier)
- Sensoranbindung über USB, seriell, Bluetooth oder TCP/IP möglich auch unter Android (GPS, Speed, Wind, Tiefe, AIS)
- NMEA0183 tauglich
- NMEA Multiplexer und WLAN-Gateway integriert
- Mit Actisense-Konverter auch mit NMEA2000 nutzbar
- Trackaufzeichnung
- Routenplanung
- Nutzung der Rasterkarten (BSB, NV, alles was sich per Download über mobile atlas creator bekommen lässt…)
- Minimaler Installationsaufwand
- Klein, geringer Stromverbrauch
- Anzeigen sind anpassbar (Größen über Settings, freie Konfiguration, was auf welcher Seite angezeigt werden soll, über json Datei)
- Erweiterbar/ anpassbar (Plugins für den Server und die App, CSS Adaption, Java Script für eigene Anzeigen)
Links
Verschiedene Einsatz-Szenarien
- „klassisches“ Setup – Raspberry im Boot verbaut, dazu ein oder mehrere Tablets zur Anzeige und Bedienung.
…
weiterlesen
- Neustart 08/2018
- weitere Projekte
- Standby seit 09/2019
- aktuell keine weiteren Aktivitäten, da Probleme der Sensorkalibrierung nicht befriedigend gelöst sind
- aktueller Ansatz Aufteilung:
- AHRS 9-Achs-Digitalsesor (Kompass, Gyro, Beschleunigungssensor)
- Controllereinheit ESP32 (ggf Kombination aus Fuzzyregelung / klassischen Regelalgorithmen)
- Aktuator Industrie-Lineareinheit
- Stand: Tests am Lagesensor AHRS (Altitude and Heading Reference Sensor)
- Projekte befinden sich noch größtenteils in Konzeptfindungsphase
- Derzeit gibt es drei Projekte, die das Thema bearbeiten:
https://www.segeln-forum.de/thread/69164-pinnenpilot-diy/?pageNo=1… weiterlesen
Der Bordcontroller überwacht und steuert das Energiesystem einer Yacht

Ziele der Entwicklung
- Erhöhung der Betriebssicherheit
- Erhöhung der Akkumulatorlebensdauer
- Schnelle Ladung der Akkumulatoren
Erhöhung der Betriebssicherheit
Durch die Anzeige der Akkumulatorzustände wird der Betreiber jederzeit über die Verfügbarkeit des Akkumulatorsystems informiert. Ein altersbedingter Defekt des Akkumulators lässt sich durch stetiges Nachlassen der Kapazität diagnostizieren, ein Akkumulatorwechsel ist so rechtzeitig zu planen.… weiterlesen


