Vorab ein paar wichtige Hinweise, die Sie unbedingt beachten sollten.
„Selbstgemacht ist wissen was drin ist – und bezahlbar.“
BoatOS startete als Experiment im Umgang mit KI-gestützter Softwareentwicklung. Ziel war ursprünglich, die eigene Motorüberwachung auf einem 1989 gebauten Stahlmotorboot zu digitalisieren – und dann wurde es plötzlich ein vollständiges Marine-Betriebssystem. Inzwischen läuft das System produktiv auf dem Boot und wird kontinuierlich weiterentwickelt.
BoatOpenIO entstand aus dem konkreten Bedarf, analoge VDO-Instrumente und andere 12-V-Sensoren günstig und flexibel in das System zu integrieren – ohne teure proprietäre Gateways.
Inhaltsverzeichnis
Inhaltsverzeichnis
BoatOS – Einführung
BoatOS ist ein vollständiges Marine-Betriebssystem für den Raspberry Pi. Es kombiniert Offline-Navigation, Motorüberwachung, Wetterinformationen, Pegelstände und automatische Logbuchführung in einem lokal betriebenen System – ohne Cloud-Abhängigkeit und ohne Abo.
Das System besteht aus zwei Frontends, die ein gemeinsames Backend nutzen:
- Helm – Flutter-App, läuft nativ auf dem Raspberry Pi. Gedacht für feste Touchscreen-Installationen im Armaturenbrett oder Cockpit.
- Deck – Browser-Frontend, kein Install notwendig. Von jedem Gerät im Bootsnetz aus erreichbar – Handy, Tablet, Laptop.
- Backend – FastAPI + WebSocket + MQTT (Mosquitto) als Kommunikations- und Datenschicht.
- SignalK – als offene Datenschnittstelle für GPS und Sensordaten.
BoatOS ist kein zertifiziertes Navigationsprodukt. Es ist ein DIY-System, das für den Einsatz auf dem eigenen Boot entwickelt wurde und offen dokumentiert ist. Ziel ist Plug-and-play: das fertige Image auf die Karte, Pi starten, fertig. Linux-Kenntnisse sind kein Muss – wer irgendwo hängt, kommt mit den Anleitungen im Repository oder einer kurzen Google-Suche in der Regel weiter. Vorteilhaft sind solche Kenntnisse natürlich trotzdem, besonders wenn man das System erweitern oder anpassen möchte.
Funktionsumfang
- Offline-Karten mit OpenSeaMap (MapLibre + Vektortiles, lokal auf SSD gespeichert)
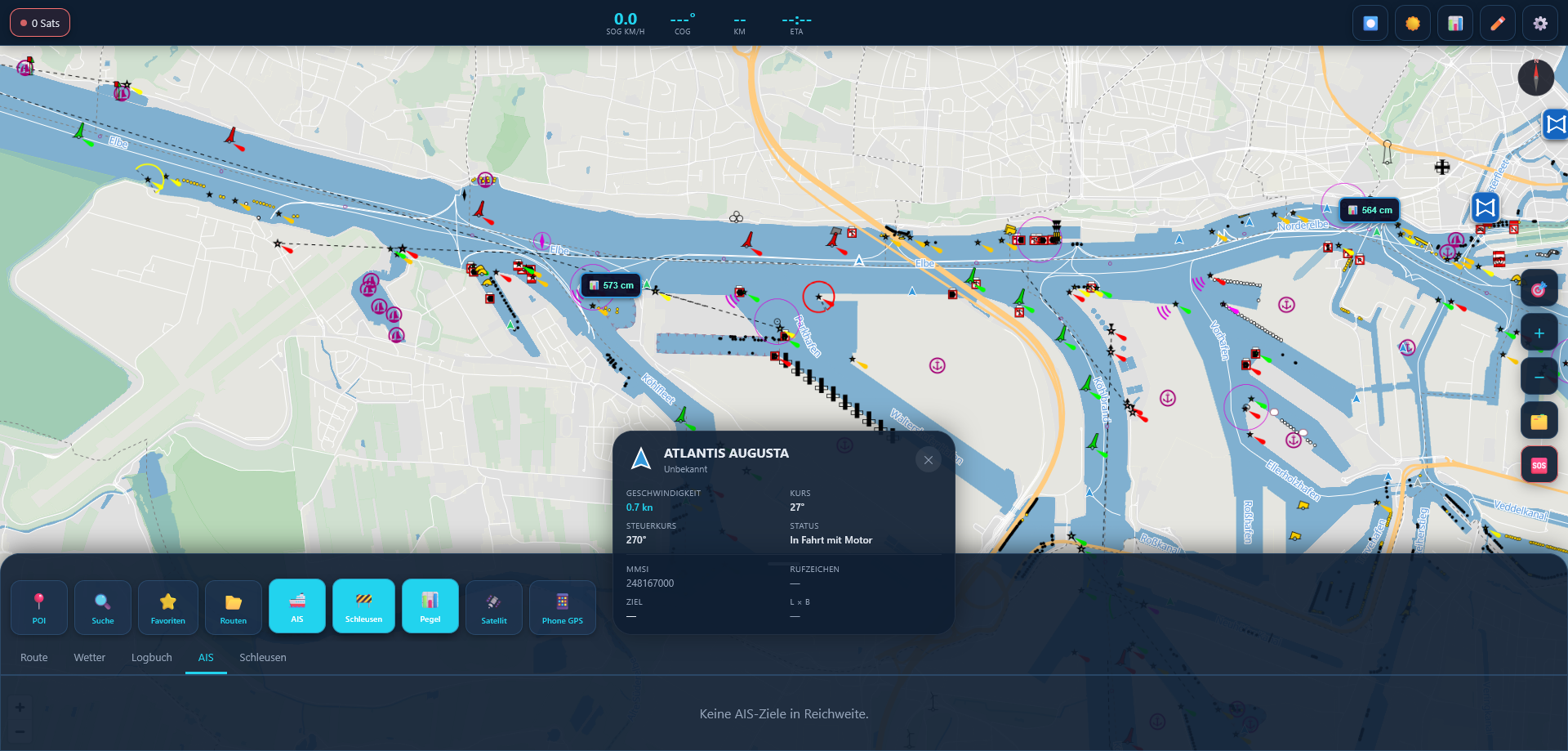
- AIS-Darstellung via AISStream.io (Internet) oder eigenem USB-AIS-Empfänger (offline)
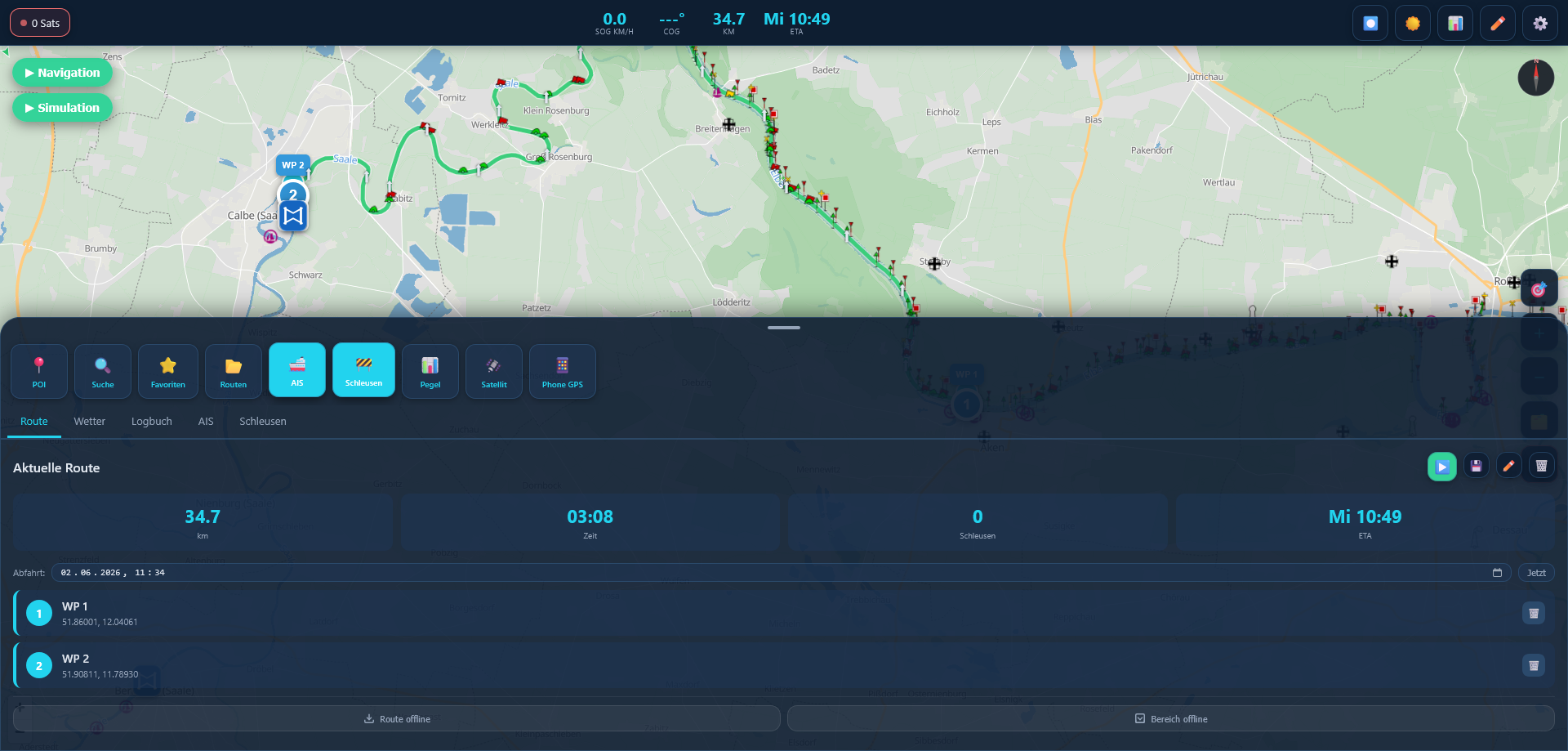
- Wasserwegrouting via OSRM (lokal auf dem Pi, keine Internetverbindung nötig)
- GPS-Track-Aufzeichnung
- Routensimulation (Faktor ×1 bis ×1000) zur Routenplanung und Reisezeitvorbereitung
Bordsystemüberwachung
- Motorüberwachung live: Batteriespannung, Öldruck, Kühlwassertemperatur, Drehzahl
- Erschütterungserkennung via MPU6050 (Impact Detection)
- SOS/MOB-Button

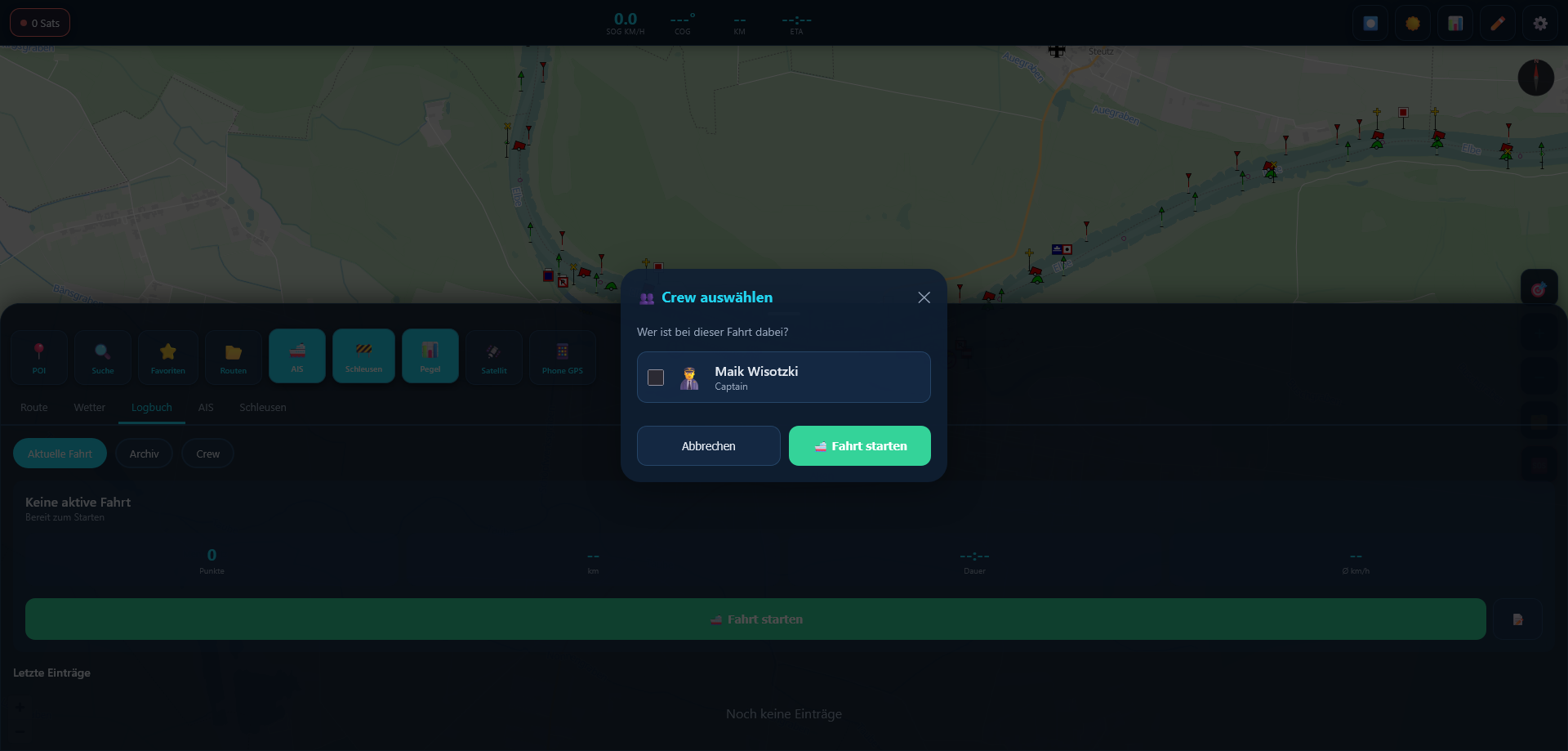
Automatisches Logbuch
Das Logbuch ist ein Kernbereich von BoatOS. Es wird manuell gestartet und beendet – jeweils zu Fahrtbeginn und Fahrtende. Während einer aktiven Aufzeichnung protokolliert es GPS-Track, Motordaten, Sensordaten und Ereignisse mit Zeitstempel und Position. Das Logbuch lässt sich im Deck-Frontend einsehen und exportieren und dient als Grundlage für die Auswertung von Fahrten, Motorlaufzeiten und aufgezeichneten Ereignissen.
Weitere Funktionen
- Wetterdaten via OpenWeatherMap
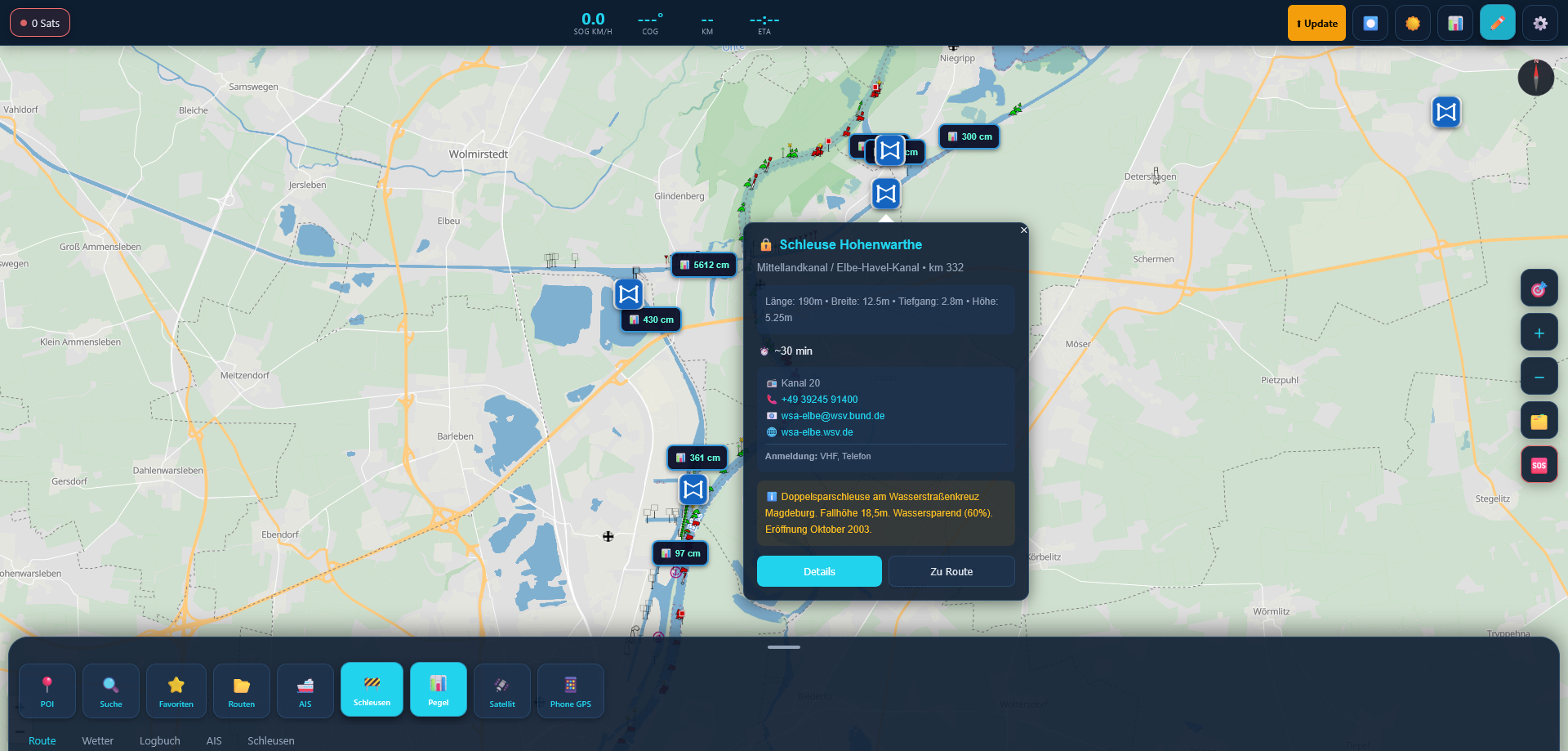
- Pegelstände via PEGELONLINE (relevant für Binnengewässer)
- Dashboard mit Widget-System und visuellem Editor
- Horizont-Widget
- Crew-Management
- Integrierter OTA-Updater
Hardware
Hardwareempfehlung
BoatOS läuft auf verschiedenen Raspberry-Pi-Varianten. Die beste Kombination aus Leistung, Stromverbrauch und Marineeignung ist der Raspberry Pi 4 mit 4 GB RAM. Der Pi 5 ist schneller, zieht aber unter Last deutlich mehr Strom – was auf Booten mit begrenzter Bordstromversorgung relevant ist.
| Hardware | Unterstützt | Bemerkung |
|---|---|---|
| Raspberry Pi 4B (4 GB) | ✓ Empfohlen | Gutes Leistungs-/Stromverhältnis für Marinebetrieb |
| Raspberry Pi 5 | ✓ | Schneller, aber höherer Stromverbrauch unter Last |
| Raspberry Pi 3B+ | ✓ | Ausreichend für Basisfunktionen, langsamere Navigation |
| Raspberry Pi Zero 2W | ✓ (eingeschränkt) | Für kompakte Installationen, nicht alle Features nutzbar |
Speichermedium
Für den Dauerbetrieb wird eine SSD empfohlen. SD-Karten eignen sich für Tests und den Einstieg, sind aber durch häufige Schreibzyklen bei dauerhaftem Betrieb anfällig. Wer eine SD-Karte nutzt, sollte mit einer Klasse-10-Karte eines renommierten Herstellers (SanDisk, Samsung) und regelmäßigen Backups arbeiten.
Für die Offline-Navigation mit vollständigen OpenSeaMap-Vektortiles werden mindestens 32 GB empfohlen, für größere Kartenregionen entsprechend mehr. Eine SSD mit 128 GB bietet ausreichend Reserven.
GPS
Empfohlen wird die GlobalSat BU-353N5 (MediaTek AG3335MN, Multi-GNSS). Sie wird per USB angeschlossen und via gpsd und SignalK in BoatOS eingebunden. Standardmäßig liefert sie NMEA 0183 bei 4800 bps – dieser Wert ist wichtig für die gpsd-Konfiguration. Andere USB-GPS-Mäuse mit NMEA-0183-Ausgabe funktionieren ebenfalls, wurden aber nicht systematisch getestet.
Touchscreen (optional)
Für die Helm-App eignen sich 10,1″-Touchscreens mit HDMI-Eingang. Eine feste Empfehlung für ein bestimmtes Modell gibt es nicht, da das Angebot wechselt. Achten Sie auf ausreichende Helligkeit (mindestens 400 cd/m²) für den Außeneinsatz im Cockpit.
Übersicht Materialkosten
| Komponente | Geschätzte Kosten | Bemerkung |
|---|---|---|
| Raspberry Pi 4B (4 GB) | ca. 100 € | |
| SSD 128 GB | ca. 20–30 € | M.2 oder extern über USB |
| GPS-Maus BU-353N5 | ca. 50 € | |
| 10,1″ Touchscreen | ab ca. 60 € (Einstieg) | Optional, für Helm-App; für den Außeneinsatz Modelle mit >400 cd/m² empfohlen |
| Gehäuse, Kabel, Kleinteile | ca. 20–30 € | |
| Gesamt (geschätzt) | ca. 250 € | Je nach vorhandener Hardware und Displaywahl |
Installation
BoatOS wird als fertiges Image bereitgestellt. Das Image enthält das Betriebssystem, das Backend, beide Frontends, SignalK, gpsd, OSRM und alle notwendigen Konfigurationen.
Aktuelle Version: v1.6.2
Das Image wird mit dem Raspberry Pi Imager auf die SD-Karte oder SSD übertragen:
- Raspberry Pi Imager herunterladen: raspberrypi.com/software
- Image herunterladen: archive.org – boatos_v1.7.0.img.gz
- Im Imager: „Eigenes Image“ → heruntergeladene Datei auswählen → auf Speichermedium schreiben
- Vor dem ersten Start: auf der Boot-Partition des Speichermediums die Datei
wlan.txtmit den eigenen WLAN-Zugangsdaten (SSID und Passwort) befüllen. Beim ersten Start liestfirstrun.shdiese Datei automatisch ein und richtet die WLAN-Verbindung ein. Wer das vergessen hat: per LAN-Kabel verbinden und die WLAN-Zugangsdaten nachträglich über die Einstellungen eintragen. - Speichermedium in den Pi einsetzen und starten
- WLAN-Passwort sofort ändern (Standardpasswort im GitHub dokumentiert)
Detaillierte Installationshinweise befinden sich im GitHub-Repository.
Sicherheitshinweise
BoatOS ist für den Betrieb in lokalen Bootsnetzen ausgelegt. Folgende Punkte sind vor dem Betrieb zu beachten:
- Kein zertifiziertes Navigationsgerät. BoatOS ersetzt keine amtlichen Seekarten und keine zugelassene Navigationssoftware. Es ist als Ergänzung zum vorhandenen Navigationsgerät gedacht, nicht als alleiniges Navigationsmittel.
- Sensordaten sind nicht geeicht. Alle angezeigten Motorwerte, Batteriespannungen und Temperaturen dienen der Orientierung, nicht der sicherheitskritischen Überwachung.
- WLAN-Passwort ändern. Das Standard-WLAN-Passwort muss nach der Ersteinrichtung geändert werden. Es ist öffentlich im Repository dokumentiert.
- Keine Haftung. BoatOS ist ein privates Open-Source-Projekt. Es wird ohne jegliche Gewährleistung bereitgestellt. Für Schäden an Personen, Booten, Geräten oder sonstige Folgeschäden, die durch den Einsatz von BoatOS entstehen, wird keine Haftung übernommen. Die Nutzung erfolgt auf eigene Gefahr.
Offline-Karten erstellen – MBTiles Creator
Ab Version 1.6.4 steht ein eigenes Windows-Tool zur Verfügung, mit dem sich Offline-Karten für BoatOS direkt erstellen und hochladen lassen – ohne Terminal, ohne Python, ohne Vorkenntnisse.
- Standalone
.exe– einfach starten, keine Installation nötig - 60+ Regionen wählbar: alle deutschen Bundesländer, Skandinavien, Großbritannien, Irland, USA, Kanada, Australien und mehr
- Konvertierung über planetiler (Java-basiert, stabil)
- Automatischer Download von
planetiler.jarbeim ersten Start - Fertige
.mbtiles-Datei direkt auf den Pi hochladen oder lokal speichern - Mehrere Kartenregionen gleichzeitig verwaltbar (seit v1.6.4)
→ MBTiles Creator herunterladen (Windows .exe, v1.6.4)
Wer die Karte lieber manuell erstellt oder Linux/macOS nutzt: .mbtiles-Dateien können auch direkt über das Deck-Frontend hochgeladen werden (Einstellungen → Karten → Hochladen).
BoatOpenIO – Einführung
BoatOpenIO ist ein modulares Marine-IO-System zur Anbindung analoger Bootsensoren an BoatOS – oder an jedes andere System, das MQTT oder Signal K verarbeiten kann.
Ausgangspunkt war ein konkretes Problem: Ältere Boote – gebaut vor dem Jahr 2000 – haben analoge Instrumente (VDO und ähnliche), die 12-V-Spannungssignale liefern. Diese direkt an einen Mikrocontroller anzuschließen erfordert Spannungsteilung, gelegentlich galvanische Trennung und je nach Sensor unterschiedliche Signalaufbereitung. Fertige Lösungen dafür sind entweder teuer oder unflexibel. BoatOpenIO löst das mit einem Stecksystem: pro Kanal wird die passende Mini-Platine eingesetzt, der Rest läuft per Software.
Die MQTT-Topics sind pro Kanal frei konfigurierbar – Standard ist boat/io/<sensor>, alternativ lässt sich per Knopfdruck ein Signal-K-Pfad eintragen. Damit ist BoatOpenIO direkt kompatibel mit BoatOS, OpenPlotter, AvNav und OpenCPN.
Architektur – v2
Das v2-Design teilt die Hardware in vier separate Platinen auf, verbunden über IDC-Flachbandkabel:
- Eingangsboard – 16 Schraubklemmen (5,08 mm), Schutzschaltung auf jedem Kanal (Bourns R_Pack08 + SP0503BAHTG Zener-Arrays), VCC-Leisten für Mini-Platinen
- Mainboard – CD74HC4067 Multiplexer, 1× ADS1115 ADC, MPU6050 Lagesensor, AMS1117-3.3 Regler – alles auf Sockeln
- ESP32-Adapterboard – ESP32-WROOM-32D direkt aufgesteckt, austauschbar für andere ESP32-Varianten
- VCC-Verteilerboard – Stromversorgung für Mini-Platinen (3,3 V und 5 V)
Alles auf Sockeln – kein Bauteil ist fest verlötet. Der ESP32 sitzt bewusst auf einem eigenen Adapterboard, damit künftige Varianten einfach getauscht werden können.
Das Mainboard hat zusätzlich einen vorbereiteten 10-pol-Stecker für 8 Ausgangskanäle (Relais, MOSFET) – für Heizung, Pumpe, Horn und weitere 12-V-Verbraucher, nach dem gleichen Mini-Platinen-Prinzip wie die Eingänge.
Mini-Platinen-Bibliothek
Jede der 16 Klemmen bekommt eine steckbare Mini-Platine, die das Signal für den ADC aufbereitet. Aktuell verfügbare Typen:
| Kürzel | Funktion | Typischer Einsatz |
|---|---|---|
| VT | Spannungsteiler | 12-V-VDO-Sensoren (Öldruck, Temperatur) → 3,3 V |
| PD / PU | Pull-down / Pull-up | Digitale Eingänge, Schalter, Geber ohne eigene Beschaltung |
| ST | Schmitt-Trigger | Pickup-Sensoren, Generatorimpulse, prellbehaftete Signale |
| ISP | Impuls-Board (Arduino/ESP01) | Drehzahlmessung, Durchflussmessung |
| OPT | Optokoppler | Galvanische Trennung bei empfindlichen Bordnetzen |
| DIR | Jumper / Direkt | Signaldurchschleifung ohne Aufbereitung |
Weitere Projekte
- Ventilheizung – 3D-gedruckte Heizringe für Frostschutz an Seewasser-Ventilen, ESP32-gesteuert. Dokumentiert in Band 6 der Buchreihe.
- AutoSat – automatische Ausrichtung einer Satellitenschüssel über GPS-Daten aus BoatOS. In Planung.
- Echolot / Tiefenmessung – geplante Einbindung eines Tiefenmessers in BoatOS, voraussichtlich mit Unterstützung durch das Open-Source-Projekt OpenEcho.
Dokumentation – Logbuch ohne Pose
Die gesamte Projektentwicklung – Hardware, Software, Fehlschläge und funktionierende Lösungen – wird in der Buchreihe „Logbuch ohne Pose“ dokumentiert. Die Bücher sind keine Hochglanz-Dokumentation, sondern ehrliche Aufzeichnungen aus dem laufenden DIY-Projekt: was warum so gebaut wurde, was nicht funktioniert hat, und wie es gelöst wurde.
Bände 1–6 sind verfügbar (Deutsch und Englisch). Band 7 und 8 sind in Arbeit.
Community & Links
- GitHub BoatOS: github.com/bigbrainlabs/BoatOS
- GitHub BoatOpenIO: github.com/bigbrainlabs/BoatOpenIO
- Fertiges Image: archive.org – boatos_v1.7.0.img.gz
- Forum: Segeln-Forum – Open Boat Projects
- Facebook: BoatOS & BoatOpenIO
- Buchreihe: amazon.de – Logbuch ohne Pose