Vorab ein paar wichtige Hinweise, die Sie unbedingt beachten sollten.

Abb. 10″ Plotter OBP 10.1 AvNav
Inhaltsverzeichnis
- 1 Einführung
- 2 Bausatz
- 3 Prozessor Boards
- 4 Hardwareempfehlung Prozessorboard
- 5 Raspberry Pi Compute Modul CM4
- 6 SSD Speicher
- 7 Externer SSD-Speicher
- 8 SD-Card und USB-Speicher
- 9 Prozessorkühlung
- 10 WiFi
- 11 AvNav Image herunterladen und konfigurieren
- 12 AvNav auf das Speichermedium kopieren
- 13 Vorbereitungen Zusammenbau
- 14 Mechanischer Zusammenbau
Einführung
Bereits zur Boot 2020 hat Christian den ersten Ansatz zu einem 10″ Eigenbau-Plotter unternommen, der Ende 2021 zur Entwicklung einer 7″-Version führte. Mittlerweile haben sich jedoch einige Punkte dieser Konzepte als nicht praktikabel herausgestellt. Insbesondere die Verwendung eines Raspi Compute Module CM3 und dessen Abkündigung hatten die Entwicklungslinie in ernste Schwierigkeiten gebracht. So hätte die Basisplatine zur Anpassung an andere Hardware komplett überarbeitet werden müssen.
In 2022 folgte dann die Entwicklung des hier vorgestellten 10″ Plotters, der gegenüber der 7″-Version noch in einigen Punkten verbessert wurde. Das Layerkonzept für den Aufbau wurde übernommen und auf nur noch einen Layer reduziert, was sich durch ein neues Gehäuse von Bopla einfach umsetzen ließ. Durch die Verwendung eines Touch-Displays und Ergänzung durch eine Fernbedienung konnte die Tastatur entfallen. Als Bedienelement am Gerät gibt es nur noch einen Ein/Aus-Schalter. Das vereinfacht den Aufbau deutlich und es entstehen weniger Probleme beim Zusammenbau und der Wasserfestigkeit. Zudem hat sich herausgestellt, dass OpenCPN mit der Tastatur nicht gut bedient werden kann. Daher wird jetzt nur noch AvNav unterstützt, was optimal zur Touch-Bedienung und Fernbedienung passt.
Der Plotter ist für die Einbindung in ein WiFi-Netzwerk ausgelegt. Im regulären Betrieb gilt das für die Anzeige von NMEA-Daten aus dem Bordnetz (Lot, Logge, Wind, AIS…), die Ausgabe von Daten (Steuerung Autopilot) und z.B. die Bedienung über ein Tablet oder Notebook am Kartentisch. Aber auch für Karten- oder Software-Updates, das Einspielen von Wegpunkten und Routen oder das Herunterladen von Tracks ist eine Verbindung zur Außenwelt eigentlich unverzichtbar. Die StandAlone-Nutzung ist zwar nicht ausgeschlossen, lässt aber viele dieser Möglichkeiten ungenutzt.
Die Verbindung zur bestehenden Bordelektronik – seien es Einzelgeräte oder ein Netzwerk – kann über kommerzielle Hardware (hier eine Übersicht) oder über dieses Open-Boat-Project erfolgen. Dabei kann der Plotter selbst als ‚Access Point‘ ein WiFi-Netzwerk für andere Geräte bereitstellen oder sich als ‚Client‘ mit einem bestehenden Netzwerk verbinden.
Bausatz
Christian hat eine erste Kleinserie als Bausatz zum 10″ Plotter aufgelegt. Enthalten ist ein Großteil der benötigten Teile, was den Aufbau enorm erleichtert.
- 10″ Touch-Display mit Ansteuerung
- Acryl Abdeckscheibe
- Bearbeitetes Gehäuse
- Raspi-HAT
- GPS-Empfänger
- Lautsprecher
- IR-Empfänger mit Fernbedienung
- Beschriftungsfolien und Dichtungen
- Bolzen, Schrauben und Muttern

Abb.: Teile-Set
Das CPU-Board und einige andere Dinge müssen von Ihnen besorgt werden. Momentan sind alle Bausätze abverkauft. Aufgrund der großen Nachfrage wird es in Zukunft weitere Bausätze geben. Wenn Sie Interesse haben, so kontaktieren Sie uns über das Kontaktformular.
Bevor Sie den Plotter zusammenbauen, sollten Sie sich überlegen wie Ihr Nutzungs-Szenario aussieht. Aufgrund der vielen Möglichkeiten unterschiedlichste Hardware einsetzen zu können, gibt es unterschiedliche Wege wie man das Projekt umsetzen kann. Die größte Hürde ist derzeit die Beschaffung eines Raspberry Pi. Nicht jedem wird es gelingen eine optimale Hardware zu besorgen und man wird mit einigen Kompromissen leben müssen. Unsere derzeitige Hardware-Empfehlung besteht aus folgenden Komponenten:
- Waveshare Mini Base Board B
- CM4 Compute Modul mit 4GB RAM und Wifi (mit oder ohne eMMC)
- Prozessorlüfter für CM4-Modul
- 128 GB SSD
- WiFi Planarantenne im Gehäuse
- 10″ Touch Display
- Bopla Gehäuse für 10″ Displays
- IR-Fernbedienung
- Externer LTE-Router für Internetanbindung (optional)
Sollten Sie sich für eine andere Hardware entscheiden, so kann es an einigen Stellen bei der Inbetriebnahme etwas schwieriger werden, weil Sie z.B. auf der Linux-Konsole Treiber nachinstallieren müssen oder einige andere Einstellungen direkt unter Linux vornehmen müssen. Das setzt eine gewisse Kenntnis im Linux-Bereich voraus, und die Bereitschaft sich mit Software-Problemen auseinander zu setzen. Mit dieser Beschreibung haben wir versucht, möglichst alle typischen Hardware-Konstellationen abzubilden. Falls das Ihnen nicht weiterhelfen sollte, können Sie gerne Ihre Fragen und Anregungen im Segeln-Forum mitteilen. Wir haben extra einen eigenen Bereich dafür eingerichtet. Verschaffen Sie sich vorher einen Überblick über gelöste Probleme bevor Sie neue Fragen im Forum stellen. Sollten Sie Lösungen für Ihre eigenen Probleme gefunden haben, so bitten wir Sie diese ebenfalls im Forum mitzuteilen. So können andere davon profitieren und sparen eine Menge Zeit und Frust.
Um das Projekt erfolgreich umsetzen zu können, sollten Sie über technische Fähigkeiten und Grundkenntnisse im Linux-Bereich verfügen. Das Projekt ist nicht Plug & Play und bedarf in einigen Bereichen einer gewissen Einarbeitung in die Thematik. Im Forum finden Sie einige Segler, die das selbe Projekt umsetzen und einen freundlichen und hilfsbereiten Umgang pflegen. So stehen Sie nicht mit Ihren Fragestellungen alleine und finden gemeinsam Lösungen. Am Ende werden Sie mit einem Plotter belohnt, der sich sehr individuell an Ihre Bedürfnisse anpassen lässt und dessen Funktionsweise Sie verstehen. Darüber hinaus würden wir uns natürlich über jede Form von Feedback freuen.
Prozessor Boards
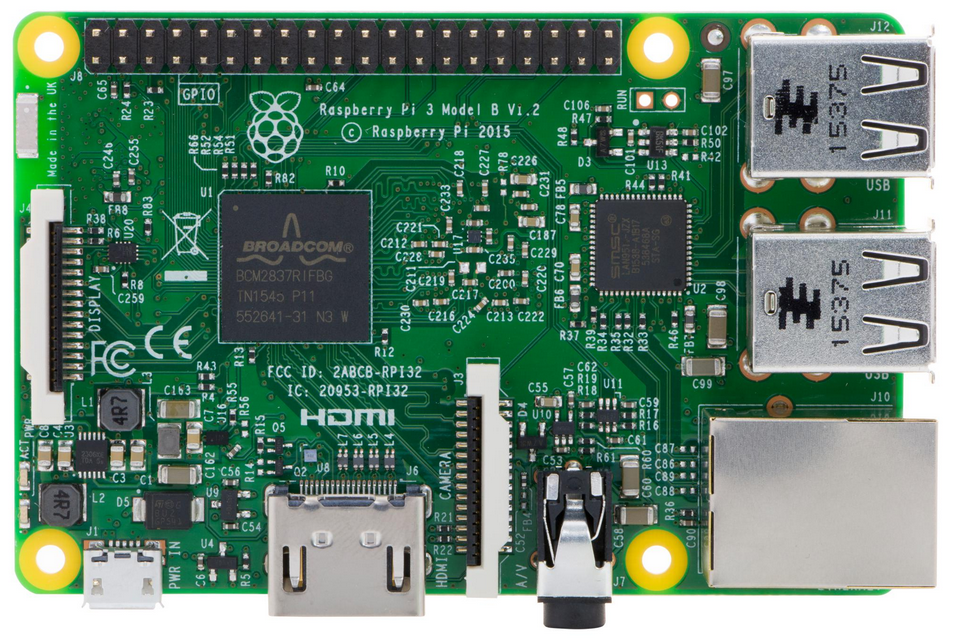
Als Basis ist ein Standard Raspberry Pi 4B vorgesehen. Der hat bereits alle wesentlichen Funktionen an Bord und die große Verbreitung erleichtert die Nutzung für weitere Funktionen.

Abb: Raspberry Pi 4B (Raspberry Pi Foundation)
Die Beschaffung eines Raspberry Pi 4B ist derzeit – Anfang 2023 – allerdings schwierig. Laut Aussagen der Raspi Foundation sollte sich die Situation im ersten Quartal ’23 verbessern, was momentan aber noch nicht zu erkennen ist. Zwischenzeitlich haben einige Konkurrenten eine Lücke für sich erkannt und bieten entsprechende Alternativen an, die auf dem besser verfügbaren Raspberry Pi Compute Module 4 (kurz: CM4-Modul) basieren und eine deutlich bessere Ausstattung aufweisen. Einige andere Konkurrenten setzen dagegen auf besser zu beschaffende Prozessoren.
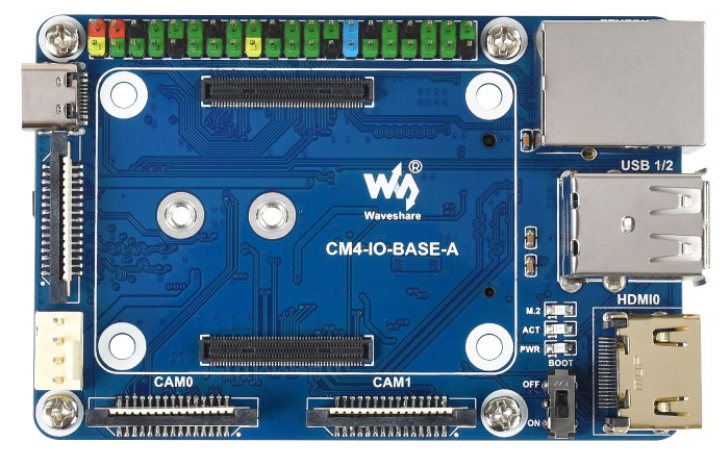
Waveshare z.B. setzt auf Mini Base Boards, die ein CM4-Modul aufnehmen können. Zusätzlich beherbergt das Base Board eine Echtzeituhr und einen SSD-Adapter für M.2 Module, die es beim Raspberry Pi 4B nicht gibt. Das macht das Mini Base Board von Waveshare sehr interessant für die Verwendung im 10″ Plotter, da mit der SSD endlich ein dauerbeschreibbares Medium zur Verfügung steht. Beim Raspberry Pi 4B muss das aufwändig über externe Module realisiert werden.

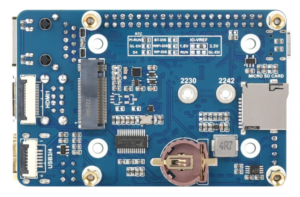
Abb.: Mini Base Board B, Ober- und Unterseite
Für das Mini Base Board B mit CM4-Modul gibt es auch angepasste drehzahlgeregelte Lüfter, die sehr praktisch sind und nicht wesentlich höher aufbauen als die Ethernet-Buchse auf dem Board.

Abb. Lüfter für CM4-Modul
Radxa
Die Firma Radxa bietet mit dem Rock 4 ein zum Raspberry Pi 4B ähnlich aufgebaute Board an, das allerdings auf einen anderen Prozessor setzt. Es ist der OP1 64-Bit-Hexa-Core-Prozessor mit Dual Cortex-A72 und Quad Cortex-A53. Der Prozessor ist ungefähr gleichwertig zum Raspberry Pi 4B, verwendet aber von der Anordnung der Schnittstellen das Raspberry Pi B3 Format. Damit sollten alle älteren Gehäuse nutzbar sein. Bei der Pinbelegung des 40-poligen Steckverbinders sind fast alle Signale an der selben Stelle wie beim Raspberry Pi 4B. Damit sollte auch der Großteil der erhältlichen HATs mit dem Board funktionieren.
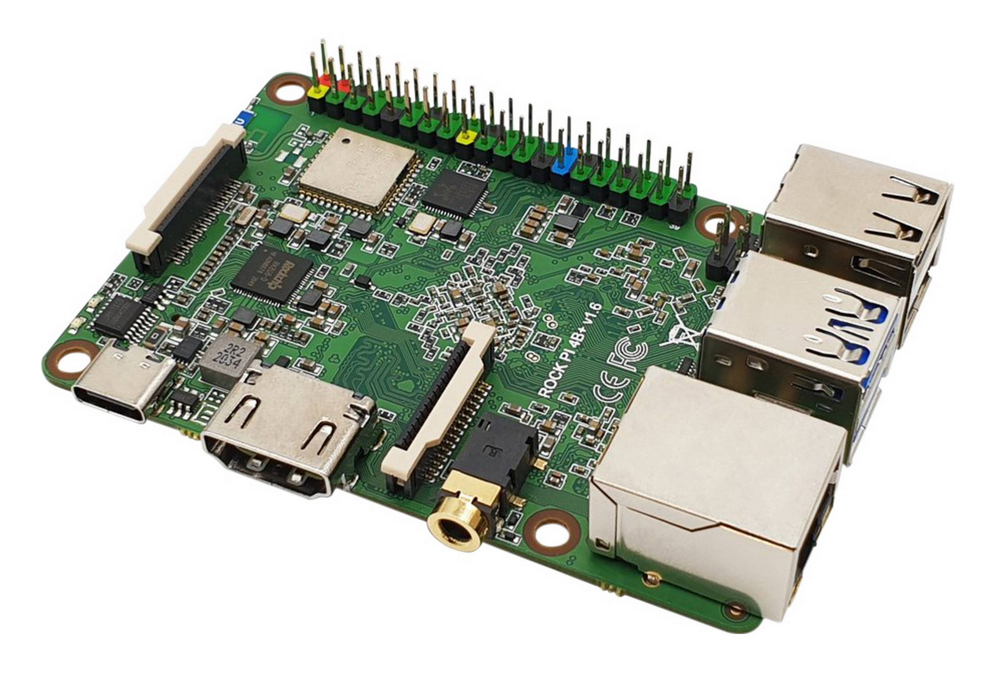

Abb.: Radxa Rock Pi 4, Ober- und Unterseite
Auch der Radxa Rock 4 unterstützt SSD-Module im M.2 Format und wäre damit ein aussichtsreicher Kandidat für den 10″ Plotter. Bei Verwendung einer SSD ist es aber nicht möglich, einen CPU-Kühler zu nutzen. Ob das Kühlkonzept ausreichend ist und der Radxa Rock Pi 4 mit dem AvNav Image läuft, muss erst noch geprüft werden. Es kann gut sein, dass noch einige Anpassungen notwendig sind. Derzeit wird keine Hardwareempfehlung für dieses Board ausgesprochen.
Hardwareempfehlung Prozessorboard
Als Prozessorboard für den 10″ Plotter können derzeit die Boards in der folgenden Tabelle verwendet werden. Die besten Ergebnisse erzielen Sie mit einem Waveshare Mini Base Board B, einem CM4-Modul mit 4GB RAM und WiFi/BT, und einem SSD Speichermedium.
| Prozessorboard | Ausstattung | Bootmedium | Bemerkung |
Waveshare Board B mit CM4-Modul |
2x USB3
1x HDMI 1x Netzwerk 10/100/1000 1x M.2 NVMe SSD 2230, 2242 1x microSD-Card 1x RTC mit Batterie 1x Lüfteranschluss geregelt |
M.2 NVMe SSD
microSD-Card über USB-Adapter |
Derzeitige Referenzimplementierung
Nicht direkt von microSD-Card bootfähig, wenn das CM4 eMMC Speicher enthält 2x USB2 und 1x HDMI über externes Adapterboard Lüfter notwendig WiFi und BT über CM4-Modul oder USB |
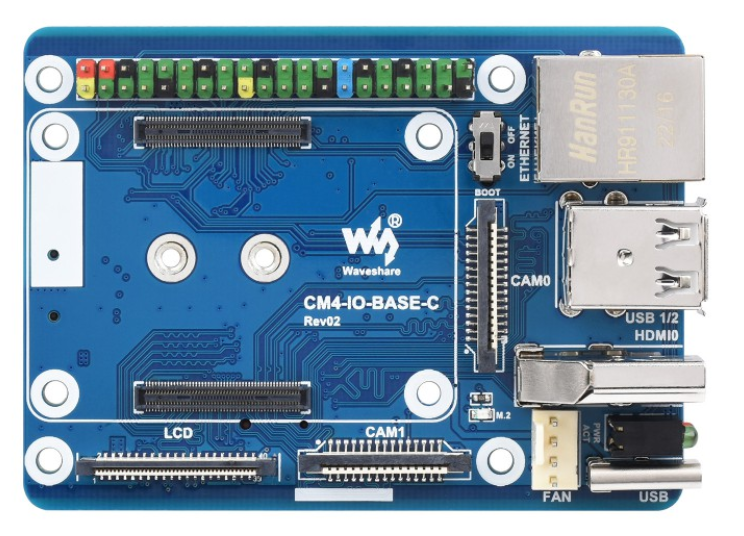
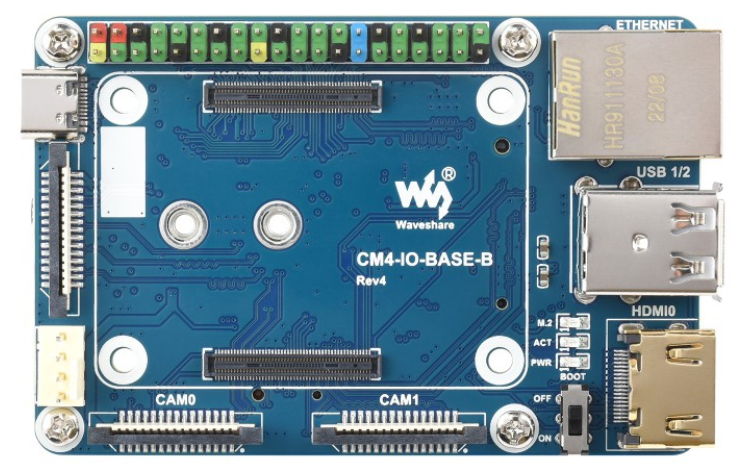
Waveshare Board C mit CM4-Modul |
2x USB3
1x HDMI 1x Netzwerk 10/100/1000 1x M.2 NVMe SSD 2230, 2242 1x microSD-Card 1x RTC mit Batterie 1x Lüfteranschluss ungeregelt |
M.2 NVMe SSD
microSD-Card über USB-Adapter |
Nicht direkt von microSD-Card bootfähig, wenn das CM4 eMMC Speicher enthält
CM4 mit min. 4GB RAM Lüfter notwendig, Audio nicht nutzbar bei Lüfter-Regelung über GPIO18 WiFi und BT über CM4-Modul oder USB |
Waveshare Board A mit CM4-Modul |
2x USB3
1x HDMI 1x Netzwerk 10/100/1000 1x M.2 NVMe SSD 2230, 2242 1x microSD-Card 1x Lüfteranschluss ungeregelt |
M.2 NVMe SSD
microSD-Card über USB-Adapter |
Nicht direkt von microSD-Card bootfähig, wenn das CM4 eMMC Speicher enthält
2x USB2 und 1x HDMI über externes Adapterboard Lüfter notwendig WiFi und BT über CM4-Modul oder USB Kein RTC enthalten |

Raspberry Pi 4B |
2x USB2
2x USB3 2x mini HDMI 1x Netzwerk 10/100/1000 1x microSD-Card 1x WiFi 2.4 GHz 1x Bluetooth |
microSD-Card
SSD über externes USB-Gehäuse möglich |
SD-Card anfällig für Defekte bei Dauerbetrieb
Lüftereinbau schwierig Min. 4GB RAM schwache WiFi-Leistung durch OnBoard-Antenne |
Raspberry Pi 3B |
4x USB2
1x HDMI 1x Netzwerk 10/100/1000 1x microSD-Card 1x WiFi 2.4 GHz 1x Bluetooth |
microSD-Card
SSD über externes USB-Gehäuse möglich |
SD-Card anfällig für Defekte bei Dauerbetrieb
Lüftereinbau schwierig Min. 4GB RAM schwache WiFi-Leistung durch OnBoard-Antenne |
Raspberry Pi Compute Modul CM4
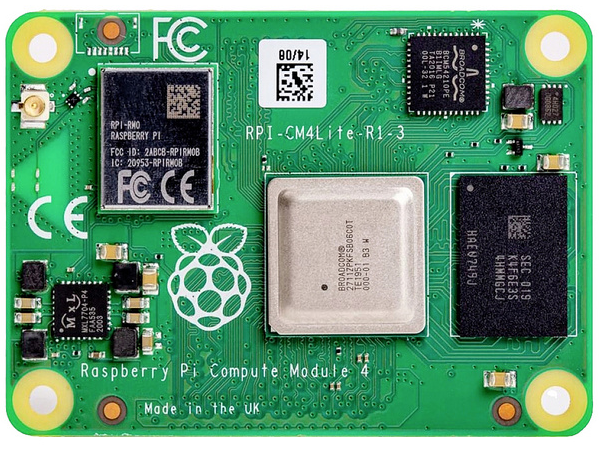
Abb.: CM4-Modul Lite mit WiFi, ohne eMMC

Abb.: CM4-Modul mit WiFi und eMMC
Für die Waveshare Boards werden CM4-Module benötigt. Auf dem Modul befinden sich alle wichtigen Hardware-Komponenten in sehr kompakter Form, allerdings ohne direkt nutzbare Anschlüsse. Auf der Unterseite befinden sich zwei Steckkontakte zum Base Board, das wiederum die üblichen Schnittstellen zur Außenwelt bereitstellt. Diese Module gibt es in verschiedensten Ausführungen. Für den 10″ Plotter können folgende Module verwendet werden:
| RAM | eMMC | WiFi / BT |
| 1GB 2GB 4GB 8GB |
ohne 8 GB 16GB 32GB |
mit ohne |
Die Module sind in 32 verschiedenen Versionen erhältlich, die aber nicht jeder Lieferant anbietet. Grundsätzlich sollte darauf geachtet werden, ein Modul mit ausreichend Speicher zu ordern. 1GB RAM ist deutlich zu wenig Arbeitsspeicher. 4GB oder größer sind empfehlenswert. Mit 2GB läuft AvNav auch, der Speicher ist aber sehr knapp bemessen, wenn dem Modul später weitere Anwendungen hinzugefügt werden sollen. Ob man ein Modul mit oder ohne eMMC Speicher ordert, ist völlig unerheblich. Meistens können Module mit 4GB RAM nur mit eMMC Speicher geordert werden. Sofern sich eMMC Speicher auf dem CM4-Modul befindet, kann der Speichersteckplatz für die microSD-Card auf den Waveshare Boards A/B/C nicht mehr benutzt werden, da der eMMC Speicher die SD-Card ersetzt. Grundsätzlich lässt sich AvNav auch auf dem eMMC Speicher installieren. Der eMMC Speicher ist aber – wie die SD-Card auch – nicht für den dauerhaften Schreibbetrieb wie bei einer SSD geeignet. Die Benutzung der eMMC für AvNav ist daher nicht empfehlenswert. Für einen dauerhaften Einsatz sollte AvNav auf einer SSD installiert werden. Sie ist auch deutlich schneller als eine SD-Card. Wer unbedingt eine SD-Card nutzen möchte, sollte damit rechnen, dass die SD-Card nach einiger Zeit langsamer im Datenzugriff wird, weil das Wear Leveling kaputt geschriebene Speicherzellen durch andere ersetzt. Der Effekt tritt erst nach einiger Zeit auf und lässt AvNav in der Bedienung spürbar träger werden. Ein funktionsfähiges Backup ist zwingend notwendig, um in kritischen Situationen einsatzfähig zu bleiben.
Wenn möglich, sollte man gleich ein Modul mit WiFi und Bluetooth kaufen, da das CM4-Modul einen Antennenstecker für eine WiFi-Antenne besitzt und man so die Antenne an einer optimalen Position im Gehäuse anbringen kann. Kaufen Sie auch gleich beim Händler die WiFi-Antenne für das CM4-Modul mit. Wer ein Modul ohne WiFi und Bluetooth kauft, kann über WiFi-USB-Module WiFi nachrüsten. Bluetooth wird allerdings dabei nicht unterstützt. Als empfehlenswert hat sich das Edimax WiFi Adapter N150 erwiesen. Wer andere WiFi-USB-Module ordert, sollte darauf achten, dass sie unter Linux im Raspberry unterstützt werden. Unter Umständen müssen Sie noch notwendige Treiber selber hinzufügen. Folgen Sie am besten unserer Empfehlung, um Problemen bei der Einrichtung von WiFi zu vermeiden. Beim Einsatz eines WiFi-USB-Moduls im USB-Steckplatz des Basis-Boards müssen Sie allerdings damit rechnen, dass die WiFi-Reichweite bzw. die Verbindungsqualität im Vergleich zu einer abgesetzten und optimal platzierten Antenne eingeschränkt ist. Mit einer USB-Verlängerung können Sie einen besser geeigneten Ort im Gehäuse nutzen.
SSD Speicher
Wer ein Waveshare Board mit CM4-Modul benutzt, kann SSD M.2 NVMe Speicherkarten benutzen. Achten Sie beim Kauf auf das Format M.2 und NVMe. Es werden auch andere Module mit NGFF/SATA angeboten, die identisch aussehen aber nicht benutzt werden können. Nachfolgend sehen Sie SSD Speicher im M.2 Format die Sie verwenden können.


Abb.: SSD M.2 NVMe Speicher
Im Waveshare Board können nur Module mit einer Länge von 30 und 42 mm verwendet werden. Derzeit finden Sie Module mit 64…512 GB. Module mit 128 GB bieten aktuell das beste Preis/Leistungsverhältnis.
Achten Sie beim Einbau des Moduls auf eine korrekte Ausrichtung des Moduls und stecken es nicht falsch herum rein. Die mitgelieferte Befestigungsschraube des Waveshare Boards ist zu lang und beschädigt beim vollständigen hinein drehen das CM4-Modul auf der Rückseite. Benutzen Sie auf jeden Fall eine geeignete M3 Unterlegscheibe oder einen Zahnscheibe und prüfen den Sitz der Schraube auf der Gegenseite bei nicht eingebauten CM4-Modul. Bei einigen SSD-Modulen berührt der Schraubenkopf den Speicher-Chip auf dem M.2 Modul und kann ihn beschädigen. Prüfen Sie auch diese Situation und verwenden ggf. eine andere Schraube.
Externer SSD-Speicher
Wer eine SSD mit einem Raspberry Pi 3B oder 4B benutzen möchte, kann z.B. externe SSD-Gehäuse für M.2 NVMe Module verwenden. Beachten Sie beim Kauf der externen SSD-Gehäuse, dass Sie auch die passigen M.2 Module kaufen. In diesen Modulen lassen sich auch SSD mit 60 mm Länge verwenden. Zum Anschluss an das Raspi Board benötigen Sie noch zusätzlich ein USB-A zu USB-C Adapterkabel.
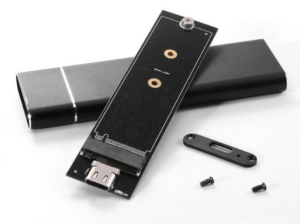
Abb.: Externes SSD-Gehäuse
Die Platine lässt sich auch ohne eigenes Gehäuse im Plotter auf dem Montagerahmen befestigen. Achten Sie auf einen dauerhaft sicheren Halt der Platine, damit ungewollte Kurzschlüsse vermieden werden.
Externe SSD-Gehäuse für M.2 NVMe Module lassen sich auch perfekt zum Kopieren des AvNav Images auf ein M.2 NVMe Modul verwenden. So können Sie den Kopiervorgang auch unter Windows und macOS durchführen.
SD-Card und USB-Speicher
Für das Betriebssystem und AvNav kann auch eine microSD-Card benutzt werden. Den Bausätzen ist eine SD-Card bereits beigelegt. Wie oben beschrieben, ist eine SD-Card keine ideales Speichermedium für einen dauerhaften Schreibbetrieb wie er unter Linux auftritt. Im Laufe der Zeit müssen Sie mit spürbaren Einschränkungen bei der Reaktionsfähigkeit rechnen. Verwenden Sie am besten hochwertige SD-Cards mit SDHC Class 10 renommierter Speicherhersteller wie SanDisk. Bevorzugen Sie möglichst hohe Schreib- und Leseraten, um zügig auf den Speicher zugreifen zu können. Speicher größer als 32 GB werden vom CM4-Modul bzw. vom Raspberry Pi nicht unterstützt.
Sofern Sie ein CM4-Modul mit eMMC Speicher benutzen, kann der SD-Card-Slot auf dem Waveshare Board nicht benutzt werden. Wenn Sie von einer SD-Card booten wollen, benötigen Sie einen SD-Card-USB-Adapter. Diese Adapter gibt es in sehr kompakter Bauweise und können direkt im USB-Port des Waveshare Boards benutzt werden. Die SD-Card wird dabei unten in den schmalen Schlitz des Steckers eingeschoben. Der Vorteil solcher Adapter ist, dass Sie die Qualität der verwendeten SD-Cards selbst festlegen können und eine Möglichkeit haben, das AvNav Image auch über einen PC auf die SD-Card zu übertragen.

Abb.: SD-Card USB-Adapter
Alternativ könnte aber auch Mini-USB-Sticks verwendet werden, die ähnliche Abmaße wie ein SD-Card USB-Adapter haben. Die Qualität der Mini-USB-Sticks lässt sich aber schwer ermitteln, da eine Vielzahl solcher Sticks von unterschiedlichen Herstellern angeboten werden. Bei Verwendung dieser Sticks müssen Sie zuvor AvNav auf dem Mini-USB-Sticks installieren.

Abb.: Mini-USB-Sticks
Als letzte Möglichkeit lassen sich auch gewöhnliche USB-Sticks verwenden, die mit einer USB-Verlängerung am USB-Port des Boards verwendet werden und auf dem Trägerboard sicher befestigt werden.
Prozessorkühlung
Abb.: CM4 Prozessorkühler von Waveshare
Der Prozessor muss während des Betriebs im Plotter gekühlt werden. Achten Sie auf eine ausreichende Prozessorkühlung, um keine Probleme durch Hardwareausfall oder Performance-Verluste zu erleiden. Eine hervorragende Kühlung ist mit dem Waveshare Board B und dem zugehörigen Prozessorkühler für das CM4-Modul gegeben. Auf dem Waveshare Board ist bereits ein 5V-Anschluss vorhanden, mit dem der Kühler temperaturgesteuert betrieben werden kann.
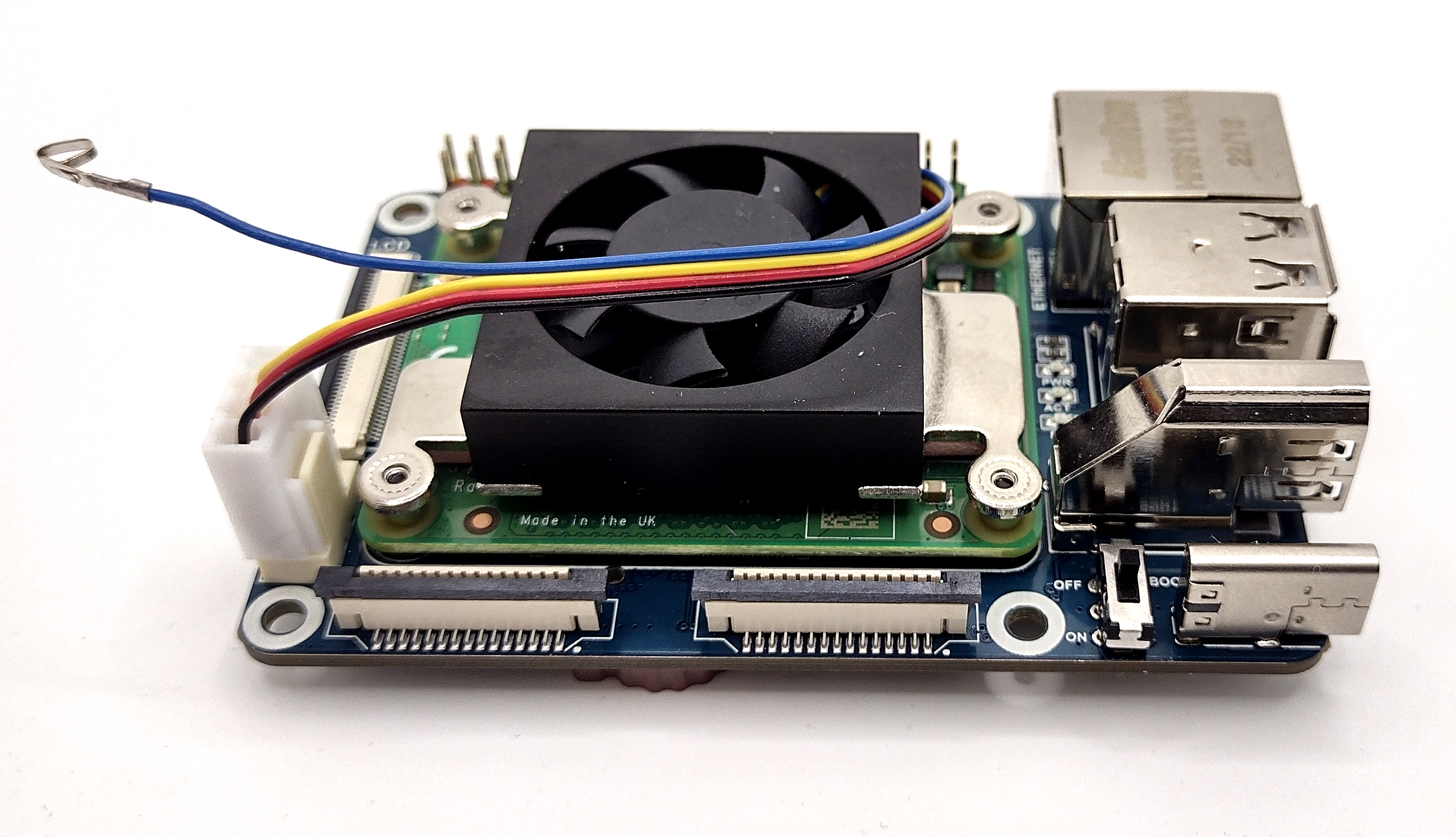
Abb.: Montierter Kühlkörper mit Lüfter auf Waveshare Board C
Leitung für Drehzahlsteuerung (blau) ausgeklinkt
Vorsicht ist bei der Verwendung des Waveshare Board A oder C gegeben. Auf diesem Boards ist kein Chip zur Temperaturregelung verbaut und das PWM-Signal zur Drehzahlansteuerung erfolgt softwareseitig über GPIO18. Da GPIO18 auch für die Audioausgabe benötigt wird, muss man auf die Audioausgabe verzichten. Wer darauf nicht verzichten möchte, kann alternativ den Steckereinsatz des blauen Kabels vom Lüfterstecker ausklinken und herausziehen. Benutzen Sie dazu eine Nadel und drücken die Sperrklinke des Steckereinsatzes etwas zurück. Danach isolieren und befestigen Sie den zurück geschlagenen Steckereinsatz am Flachbandkabel. Der Lüfter dreht dann mit maximaler Drehzahl. Die Lüfter-Geräusche sind aber nicht wesentlich lauter als bei einem geregelten Lüfter.
Alternativ kann auch GPIOxx zur Lüftersteuerung verwendet werden. Damit dies möglich ist, müssen Sie das blaue Kabel des Lüftersteckers herausziehen und mit Pin xx der 40 pol. Steckleiste verbinden. Zusätzlich benötigen Sie ein Python Script, dass ein PWM-Signal zur Drehzahlansteuerung per Software bereitstellt. Dieses Script muss so konfiguriert werden, dass es automatisch beim Booten startet. Die Methode wird nur fortgeschrittenen Usern mit Erfahrung empfohlen. Allen anderen werden die vorigen beiden Methoden der Prozessorkühlung empfohlen.
Raspberry Pi Kühlung
Für den Raspberry Pi 3B / 4B gibt es keine so einfache Methode zur CPU-Kühlung wie beim CM4-Modul. Hier müssen Sie sich individuell behelfen und eigene Lösungen finden. Eine Möglichkeit bestände darin, auf die CPU einen Kühlkörper zu kleben und mit einem Radiallüfter seitlich Luft einzublasen.

Abb.: Raspberry Pi 4B mit Kühlkörpern
WiFi
Sofern ein Raspberry Pi oder ein CM4-Modul mit WiFi verwendet wird, kann AvNav so eingestellt werden, dass es als WiFi-Access Point arbeitet oder als Client mit einem anderen WiFi-Netzwerk verbunden werden kann. Die Konfiguration der Betriebsart erfolgt über den Webkonfigurator. Das WiFi-Netzwerk arbeitet im 2.4 GHz Bereich und unterstützt 802.11 bgn. Damit sind Datenübertragungsraten bis zu 150 MBit/s möglich, was ungefähr 15 MB/s entspricht. Die Datenübertragungsrate ist aber von der verwendeten Antenne und von der Auslastung des Funkkanals abhängig. In überfüllten Häfen mit viel WiFi-Betrieb im 2.4 GHz Bereich kann die Datenübertragungsrate deutlich einbrechen und teilweise auch Verbindungsabbrüche verursachen. Die kleinen Print-Antennen auf den Raspberry Pi 3B/4B Boards sind nicht sonderlich gut geeignet, um sich mit einem Hafen-WiFi-Netzwerk zu verbinden. Wer gute Verbindungsqualitäten benötigt, sollte auf leistungsfähige externe Antennen setzen und auf eine ausreichende Antennenhöhe achten.

Abb.: Externe WiFi Antenne am CM4-Modul

Abb.: Planar-Antenne für CM4-Modul für internen Einbau
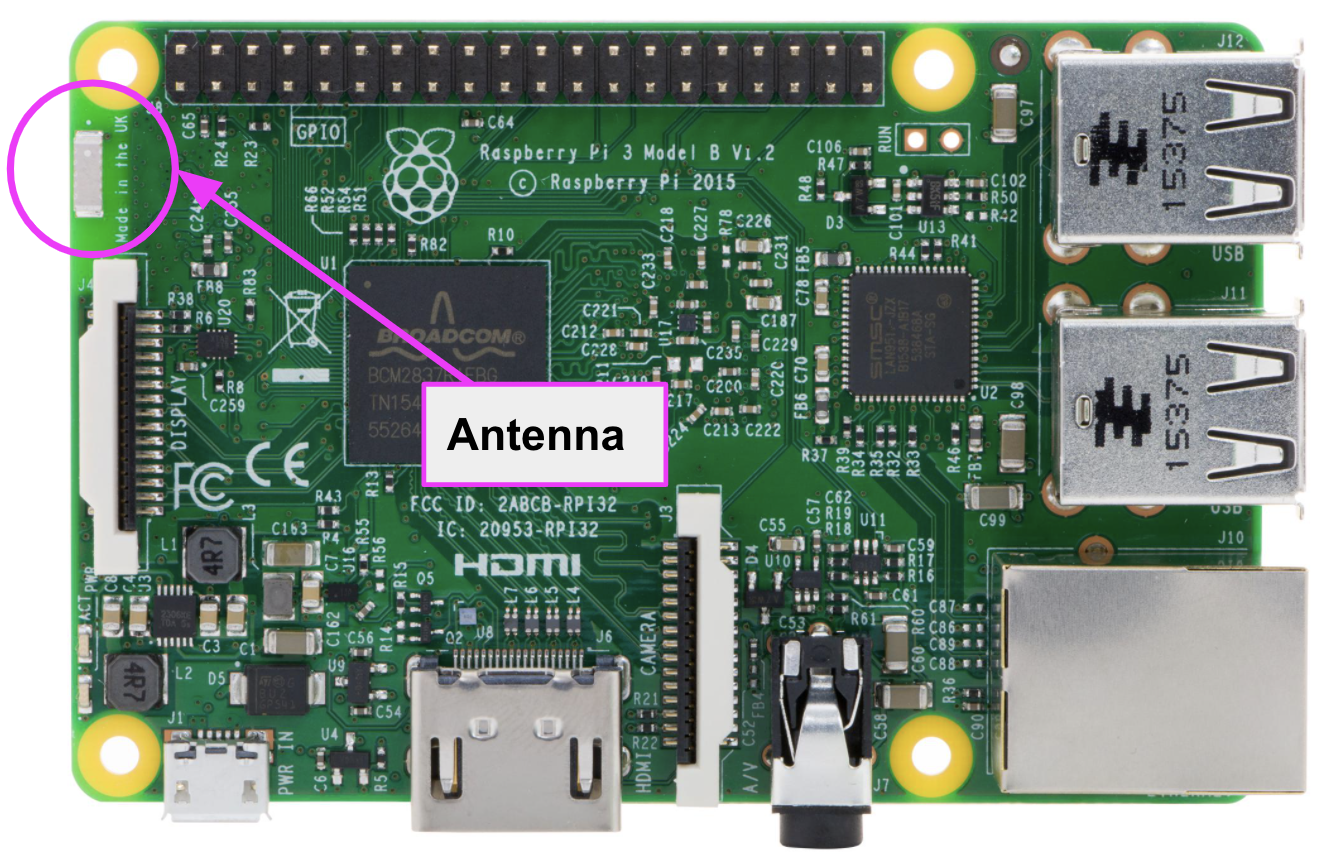
Abb.: WiFi Antenne Raspberry Pi 3B
Beim CM4-Modul mit WiFi besteht die Möglichkeit eine externe Antenne anzuschließen, die entweder im Gehäuse verbaut oder über einen Anschluss nach außen geführt wird. Wer beim Raspberry Pi 3B/4B mit externen Antennen arbeiten möchte, kann das mithilfe eines WiFi-USB-Sticks tun, der über einen Anschluss für eine externe WiFi-Antenne verfügt.
WiFi Access Point
Der WiFi Access Point wird bei AvNav mit dem WiFi-Chip auf dem Board realisiert. Sollte die Konfiguration auf WiFi-Client eingestellt sein, dann übernimmt der WiFi-Chip die Client-Verbindung zu einem externen WiFi Netzwerk. Der Access Point ist in dem Fall abgeschaltet. Wer weiterhin einen WiFi Access Point benötigt, muss einen USB-WiFi-Adapter benutzen. Konsultieren Sie vorher die Kompatibilitätsliste für Debian und schauen, ob der Adapter auch als Access Point geeignet ist. Denn nicht alle Adapter unterstützen unter Linux den AP Modus.
In AvNav können zwei unabhängige WiFi-Netzwerke betrieben werden. AvNav kann gleichzeitig mit dem Hafen WLAN verbunden sein und über den Access Point die Internet-Verbindung an andere WiFi-Geräte durchreichen. Es ist aber zu beachten, dass keine Firewall dazwischen geschaltet ist und man damit einem erhöhten Sicherheitsrisiko ausgesetzt ist. Solange AvNav isoliert vom Internet betrieben wird, stellt der Access Point kein Risiko dar.
Wer sicher eine dauerhafte Internet-Verbindung im Boot betreiben möchte, sollte sich einen LTE-Router mit einem eigenständigen Access Point zulegen. AvNav ist dann als Client an den LTE-Router angebunden. Alle anderen Geräte wie Handys, Tablets und Laptops sind dann ebenfalls mit dem LTE-Router verbunden und können ihre Daten untereinander austauschen. Durch die eingebaute Firewall im LTE-Router sind die Geräte nicht im Internet erreichbar und angreifbar. Die Sicherheit ist deutlich höher als bei einer Direktanbindung zum Internet. Zudem umgehen Sie die Problematik einen geeigneten USB-WiFi-Adapter zu finden, der auch als Access Point benutzt werden kann.
WiFi Client
AvNav kann auch als Client betrieben werden. In der Webkonfiguration ist dazu die Option Internal WiFi as Client zu aktivieren. Dabei übernimmt dann der WiFi-Chip auf dem Board die Verbindung zum externen WiFi-Netzwerk. Ein zuvor aktivierter WiFi Access Point wird dann abgeschaltet, sofern nicht ein weiterer USB-WiFi-Adapter verwendet wird. Die Client-Verbindungsparameter werden über die Oberfläche direkt in AvNav eingestellt.
Sofern Sie ein CM4-Modul ohne WiFi in Verbindung mit einem Waveshare Board verwenden, können Sie mit einem USB-WiFi-Adapter eine Client-Verbindung herstellen. Achten Sie darauf den USB-WiFi-Adapter in den xxxx Port zu stecken. Auf dem anderen Port kann er nicht als WiFi-Client benutzt werden.
Für den 10″ Plotter gibt es ein vorgefertigtes AvNav Image. Dieses Image enthält alle notwendigen Software-Erweiterungen, um die komplette Hardware des Plotters ansteuern zu können:
- Displayansteuerung
- Touch-Sensor für Display
- Adaptive Displayhelligkeit
- Tonausgabe
- IR-Fernbedienung
- RTC
- Lüftersteuerung
- GPS-Empfänger
- CAN Treiber für NMEA2000
- USB Treiber für NMEA0183
- WiFi Unterstützung
Es lohnt sich nicht, ein eigenes Linux für AvNav aufzusetzen. Der Aufwand ist immens groß und bei Problemen muss man selbst Lösungen finden. Bitte haben Sie Verständnis, dass wir nur für das von uns bereitgestellte AvNav Image Support bieten können. Die Behebung von Problemen bei selbst durchgeführten Modifikationen am Image müssen von Ihnen selber vorgenommen werden.
Das AvNav Image besteht aus zwei Teilen. Der erste Teil ist das Image selbst, der zweite Teil eine Konfigurationsdatei. Beide Teile müssen getrennt herunter geladen und später auf das Speichermedium übertragen werden.
Das AvNav Image gibt es in zwei Versionen, als 32Bit-Version und als 64Bit-Version. Laden Sie das Image für ihre jeweilige Hardware als 32Bit-Version herunter und speichern Sie die Zip-Datei auf dem PC. Die 64-Bit-Version ist zwar auch möglich, wir empfehlen aber ausdrücklich die 32Bit-Version.
| Image-Version | Hardware |
| 32Bit-Version | Waveshare Board mit CM4, Raspberry Pi 4B, Raspberry Pi 3B |
| 64Bit-Version |
Waveshare Board mit CM4, Raspberry Pi 4B, Raspberry Pi 3B |
Die Konfiguration von AvNav auf die Plotter-Hardware erfolgt über eine webbasierte Konfigurationsseite außerhalb des Raspi Boards auf einem PC. Dort werden die Hardware-Komponenten ausgewählt und konfiguriert. Unter folgenden Link kann die Konfigurationsseite aufgerufen werden:
Nehmen Sie für den 10″ Plotter folgende Einstellungen vor:
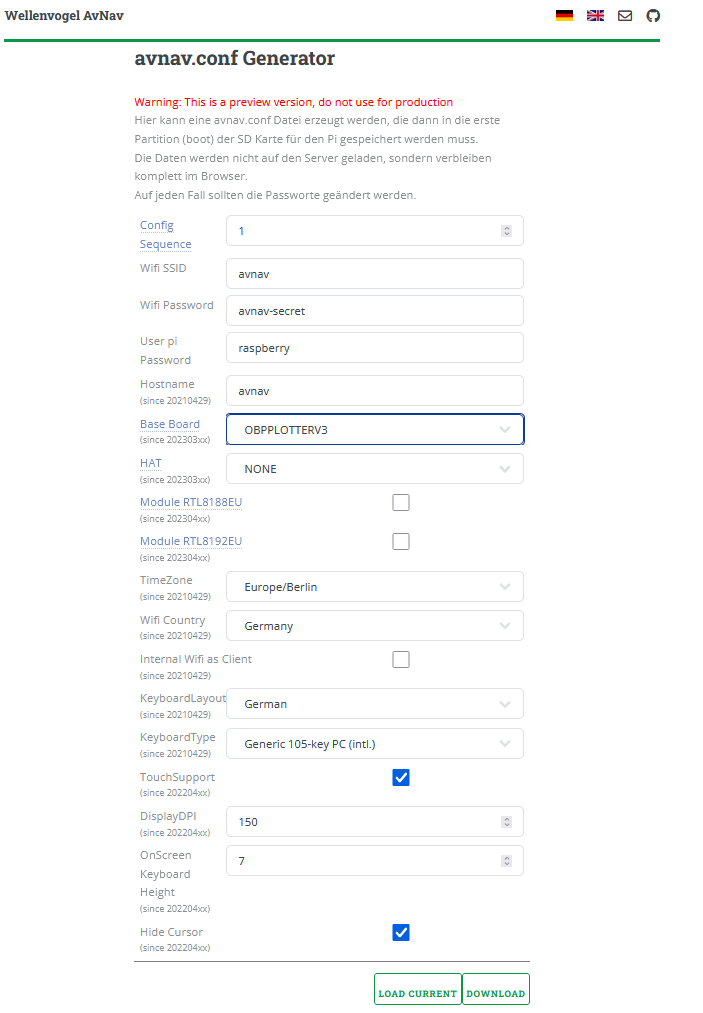
Abb.: AvNav Konfigurator (Bild anklicken zum Vergrößern)
Die Einträge 2…5 können individuell angepasst werden. Achten Sie bei der Eingabe von Sonderzeichen darauf, dass sie dem ASCII Zeichensatz entsprechen. Andernfalls können Sie sich unter Umständen nicht in das System einloggen. Am Ende der Konfiguration können Sie über den Button Download eine Datei mit dem Namen avnav.conf herunter laden. Diese Datei wird dann später dem AvNav Image auf dem Speichermedium hinzugefügt.
Die Installation von AvNav wird grundsätzlich mit dem Raspberry Pi Imager vorgenommen. Der Imager formatiert das Speichermedium, kopiert das entpackte AvNav Image darauf und richtet es bootfähig ein. Im letzten Schritt wird die AvNav-Konfigurationsdatei dem Speichermedium hinzugefügt.
Unter nachfolgendem Link kann der Raspberry Pi Imager für Linux, Windows und macOS herunter geladen werden:
https://www.raspberrypi.com/software/
Nach der Installation können Sie den Raspberry Pi Imager starten.

Abb.: Raspberry Pi Imager
Das AvNav Image wird als Zip-File bereitgestellt und muss noch entpackt werden. Als entpackte Datei sollte eine Datei mit dem Namen xxx-anvan-xxx.img zu sehen sein. Diese Datei enthält das Linux Betriebssystem und die notwendige Software für AvNav und wird für den Raspberry Pi Imager benötigt.
Um AvNav auf eine SD-Card oder einen USB-Speicherstick zu kopieren, verbinden Sie das Speichermedium mit Ihrem PC. Sorgen Sie dafür, dass das Medium gelöscht und frisch FAT32 formatiert ist. Sie sollten anschließend Ihr Speichermedium als eigenständiges Laufwerk im Dateibaum sehen.
Im Raspberry Pi Manager wählen Sie über den Button OS wählen -> Eigenes Image das Betriebssystem aus, indem Sie auf die Image-Datei xxx-anvan-xxx.img verweisen. Als SD-Karte wählen Sie das Laufwerk aus, unter dem Ihr Speichermedium zu finden ist. Das Speichermedium sollte mindestens über 4GB Speichergröße verfügen.
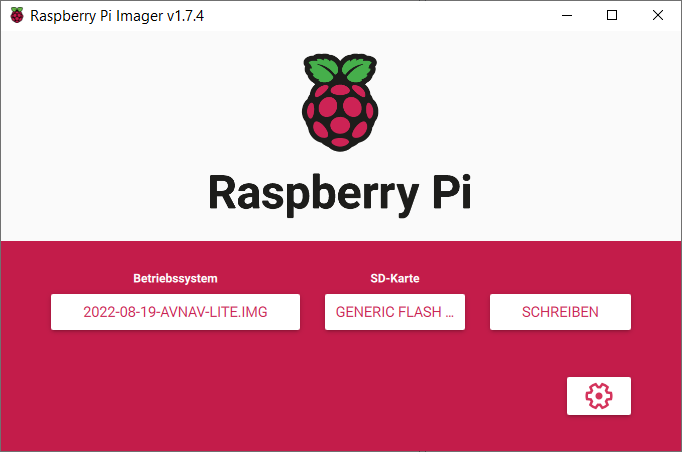
Danach drücken Sie auf Schreiben. Nun wird das Image auf das Speichermedium geschrieben. Das dauert je nach Größe des Mediums ungefähr 2…5 Minuten.
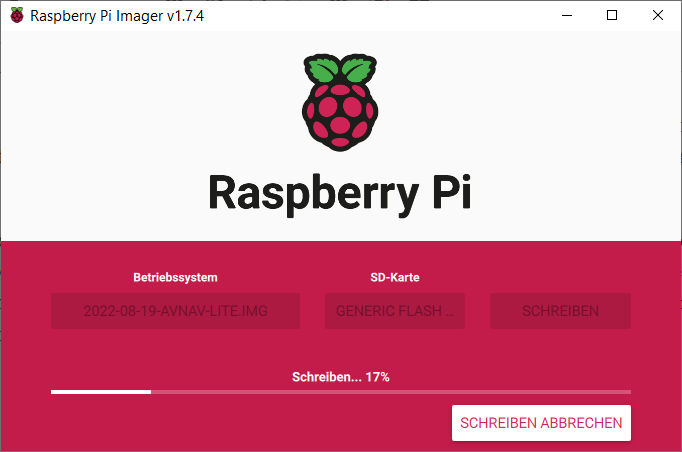
Nach dem Kopiervorgang wir das Image noch einmal geprüft und der ganze Vorgang ist abgeschlossen.
Das Kopieren von AvNav auf eine SSD kann auf zwei Arten erfolgen. Entweder über ein externes SSD-Gehäuse für M.2 NVMe Module oder über eine USB-Verbindung mit dem Raspi Board. Die Variante mit dem externen SSD-Gehäuse ist recht einfach und man kann der Anleitung wie beim Kopieren auf eine SD-Card folgen. Sie ist geeignet für Linux, Windows und macOS und erfordert keine speziellen Software-Vorbereitungen.
Abb.: Externes SSD-Gehäuse
Die zweite Variante über eine USB-Verbindung mit dem Raspi Board ist nur für Waveshare Boards mit einem CM4-Modul gedacht und funktioniert nur unter Linux. Dazu benötigt man das Programm usbboot, dass man sich vorher auf seinem Linux-PC kompilieren muss und dann auf dem PC ausführt. Dabei muss das Waveshare Board mit CM4-Modul mit aktiviertem Bootmodus mit einem USB-Kabel mit dem Linux-PC verbunden sein. usbboot wird dabei auf dem Linux-PC gestartet und läd über USB ein Minimal-Linux in den Raspi, mit dem er sich wie ein USB-Memory-Stick verhält. Danach bekommt man mehrere Laufwerke angezeigt, die den jeweiligen Speichertypen (SD-Card, EEPROM, SSD) entsprechen. Mit dem Raspberry Pi Imager wird dann das Image auf den Raspi wie bei einer SD-Card auf die SSD übertragen. Damit das Ganze aber funktioniert, muss das CM4-Modul den richtigen Bootloader enthalten, der von USB und SSD starten kann. Der Bootloader auf einigen CM4 Modulen ist teilweise zu alt und muss aktualisiert werden, da ein Booten von SSD nicht möglich ist. usbboot enthält alle notwendigen Programme dazu. Nachfolgend wird beschrieben, wie der Bootloader aktualisiert wird und wie man das Raspi Board mit dem CM4-Modul in den USB-Memory-Modus versetzt. Ausgangspunkt ist das Homeverzeichnis. Das Waveshare Board muss mit dem Linux-PC über ein USB-Kabel an der USB-C-Buchse verbunden sein. Der Stecker der USB-C-Buchse muss spürbar einrasten. Anderenfalls können Sie keine Verbindung zum Board aufbauen. Der PC muss dabei mindestens 500 mA Strom zur Verfügung stellen, damit der Raspi starten kann. Zusätzlich muss auf dem Board der Boot-Schalter auf on gesetzt sein. Bei einigen Boards ist ein Jumper zu setzen.
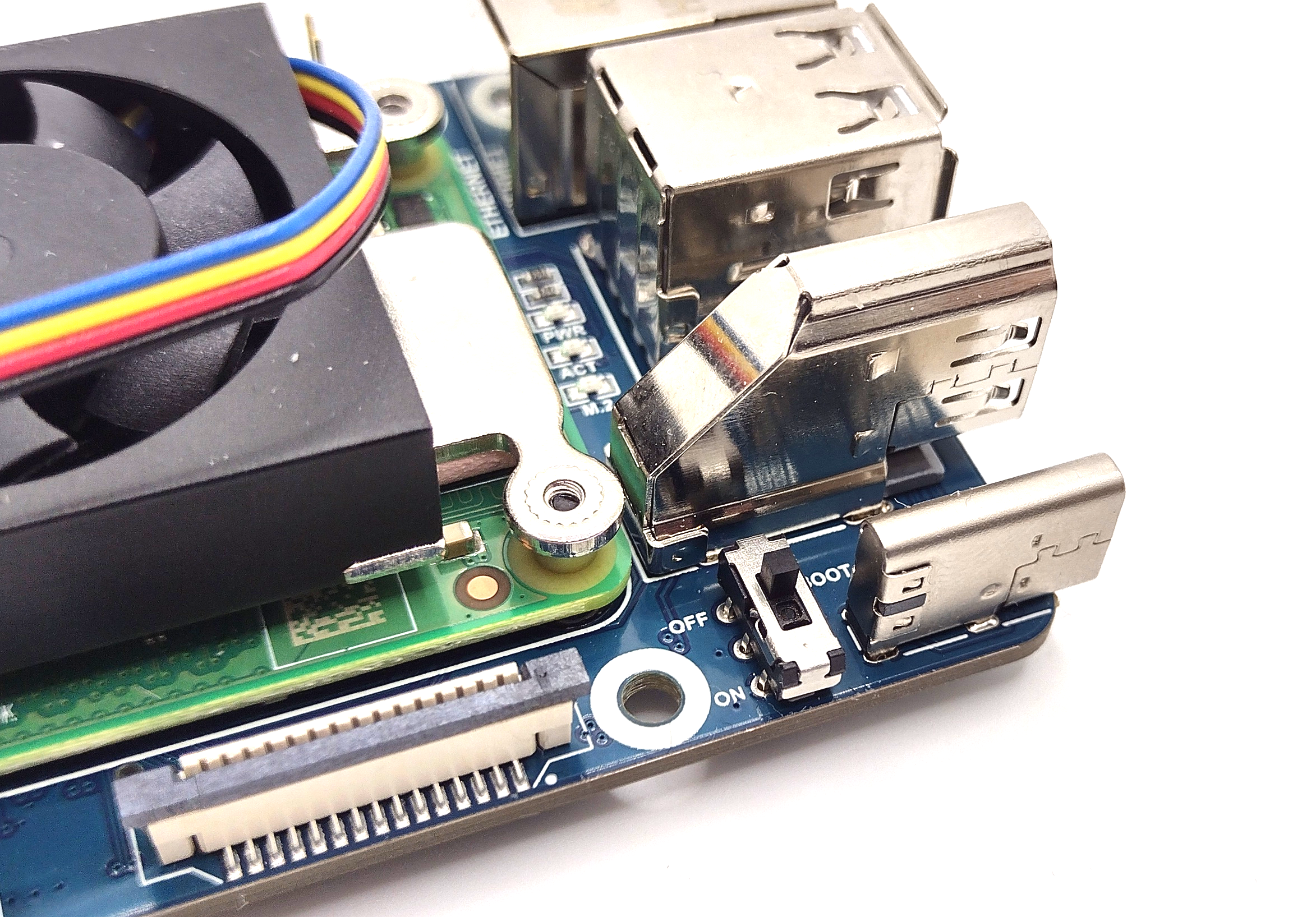
Abb.: Boot-Schalter
Danach sind folgende Schritte durchzuführen bzw. die kursiv geschriebenen Befehle im Terminal-Fenster von Linux einzugeben:
- Boot-Schalter auf on stellen und Board über die USB-C Buchse mit dem PC verbinden
- Git herunterladen:
sudo apt install git libusb-1.0-0-dev pkg-config - Verzeichnis usbboot erzeugen:
sudo mkdir usbboot - Ins Verzeichnis usbboot wechseln:
cd usbboot - usbboot herunterladen:
git clone –depth=1 https://github.com/raspberrypi/usbboot - Software kompilieren:
make - Bootloader aktualisieren:
sudo ./rpiboot -d recovery - USB Kabel vom PC abziehen und wieder einstecken für Reboot
- USB-Verbindungssoftware auf Raspi übertragen:
sudo ./rpiboot -d mass-storage-gadget - Prüfen, ob der Raspi als USB-Gerät zu sehen ist:
lsusb - Prüfen, welche Laufwerke zu sehen sind:
sudo dmesg - AvNav mit dem Raspberry Pi Imager wie bei der SD-Card übertragen (nvme0n1 – SSD, mmcblk0 – eMMC)
- USB Kabel vom PC abziehen und Boot-Schalter auf off stellen
Detaillierte Terminal-Ausgaben sind hier zu finden. Sofern ein Speichermedium im Schritt 9 bereits formatiert war, werden alle verfügbaren Laufwerke wie SSD, eMMC und SD-Card im Dateimanager von Linux angezeigt und automatisch geöffnet. Wenn nichts automatisch geöffnet wird, ist keines der verfügbaren Laufwerke formatiert. Dann kann man im Schritt 10 prüfen, ob das Raspi Board überhaupt als USB-Device zu sehen ist. Sie sollten eine Meldung wie diese finden:
Broadcom Corp. Raspberry Pi multi-function USB device
Im Schritt 11 sehen Sie im Detail welche Laufwerke verfügbar sind und welche Namen dafür vergeben werden:
scsi 8:0:0:0: Direct-Access nvme0n1 (SSD NVMe)
scsi 7:0:0:0: Direct-Access mmcblk0 (falls eMMC auf CM4 vorhanden ist)
Dabei stehen nvme0n1 für eine SSD und mmcblk0 für einen eMMC Speicher. Unter diesen Namen sind die Speicher im Raspberry Pi Imager ansprechbar und werden unter dem Punkt SD-KARTE WÄHLEN ausgewählt. Die Übertragung von AvNav erfolgt in selber Weise wie bei einer SD-Card.
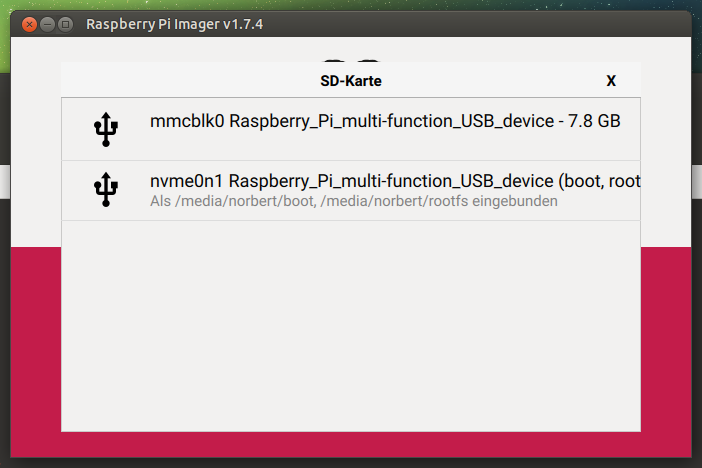
Abb.: SSD und eMMC als Installations-Laufwerke
Nach erfolgreicher Übertragung ziehen Sie das USB-Kabel ab und setzen den Boot-Schalter wieder auf off zurück. So startet der Raspi beim nächsten Mal von dem Speichermedium, das er als erstes findet. Die Bootreihenfolge der Speichermedien ist so eingestellt:
Bootreihenfolge
- SD-Card-Slot / eMMC
- Speichermedium an USB-A
- SSD NVMe
- Speichermedium an USB-C oder an USB-A beim CM4
- Netzwerk
- Reboot
Wird kein bootfähiges Speichermedium gefunden, so führt der Raspi einen Reboot durch und prüft wieder nacheinander alle Speichermedien ab. Falls Ihr CM4-Modul bereits ein bootfähiges Image im eMMC Speicher hat und Sie eine SSD nutzen wollen, so müssen Sie das Image von der eMMC entfernen. Das können Sie machen, indem Sie Punkt 9 erneut ausführen und mit GParted alle Partitionen des eMMC-Laufwerks löschen. Wenn Sie das nicht machen, wird immer vom eMMC gestartet obwohl eine bootfähige SSD vorhanden ist.
Wer die Bootreihenfolge ändern möchte, kann auf dem PC in das Unterverzeichnis ../usbboot/recovery wechseln und die Datei boot.conf bearbeiten und dann noch einmal den Bootloader auf dem CM4-Modul aktualisieren. Informationen zur Einstellung der Bootreihenfolge sind unter dem Link zu finden.
Grundsätzlich kann mit der geschilderten Methode auch der eMMC Speicher als Bootmedium benutzt werden. Wir raten aber ausdrücklich davon ab, da eMMC Speicher nicht dauerschreibfähig ausgelegt ist. Bei einem Defekt des eMMC Speichers, haben Sie keine Möglichkeit den Speicher zu tauschen. Benutzen Sie dann stattdessen wechselbare SD-Cards.
Konfigurationsdatei dem Speichermedium hinzufügen
Vorbereitungen Zusammenbau
Vorab ein paar Hinweise, die Sie bei der Verwendung von Schrauben in Kunststoff beachten sollten. Kunststoff-Schrauben sind so konstruiert, dass sie ihr Gewinde selbständig in den Kunststoff einschneiden können. Das Eindrehen von Schrauben in Kunststoff mit vorhandenem Gewinde sollte so erfolgen, dass die Schraube angesetzt wird und zu erst links herum gedreht wird, bis es eine spürbare Einrastung gibt. In dem Moment ist das Gewinde des Schraube mit den Gewinde im Kunststoff synchron. Erst danach darf die Schraube rechts herum gedreht werden. Beachten Sie das nicht, so kann das bereits vorhandene Gewinde im Kunststoff zerstört werden. Ziehen sie die Schraube nicht zu stark an. Anderenfalls könne Sie das Gewinde überdrehen und die Schraube hält nicht mehr. Die Hinweise gelten insbesondere für das Gehäuse. Um die Wasserdichtigkeit zu erfüllen, müssen die Schrauben die Gehäusedichtung sicher anpressen.
Das Aufbau-Konzept orientiert sich an der bewährten Bauweise mit Layern auf denen die Komponenten befestigt werden. Beim 10″ Plotter gibt es nur noch einen Layer. Das Prozessor-Modul, also der Raspberry Pi 4 oder das Waveshare Mini Base Board mit CM4-Modul, wird kopfüber auf dem Montage-Layer befestigt und die Erweiterungsplatine daran angeschlossen.
Werkzeuge, Hilfsmittel und Verbrauchsmaterialien
| Werkzeuge | Verwendung | Bezugsquelle |
| Pinzette | ||
| Cuttermesser / Skalpell | ||
| Torx Schraubendreher-Satz (TX8, TX10) | ||
| Maulschlüssel-Satz | ||
| Schraubendreher-Satz | ||
| Feinzange | ||
| Elektronik Seitenschneider | ||
| Elektronik Lötkolben | ||
| Entlötpumpe (optional) | ||
| Schälbohrer | Löcher groß | |
| Bohrer-Satz | Löcher klein | |
| Akkuschrauber | ||
| Hilfsmittel | ||
| Digitalmultimeter | Funktionstest | |
| Laptop / PC / Tablet / Handy | Funktionstest | |
| Netzwerkkabel | Funktionstest | |
| Oszilloskop (optional) | Funktionstest | |
| Verbrauchsmaterialien | ||
| Lötzinn D 1mm | ||
| Entlötlitze (optional) | ||
| Alkohol 99% | Reinigung | Drogeriemarkt, Baumarkt |
| Q-Tips | Reinigung | Drogeriemarkt |
| Lappen | Reinigung |
Bauteilliste
Prüfen Sie als nächstes die Vollständigkeit der Bauteile.
| Position | Anzahl | Bauteil | Werkstoff | Bezugsquelle | Bemerkung |
| Mechanikteile | |||||
| 1 | 1 | Gehäuse Oberschale weiß | ABS | Bopla | |
| 2 | 1 | Gehäuse Unterschale weiß | ABS | Bopla | |
| 3 | 1 | Gehäusedichtung blau | EPTG | Bopla | |
| 4 | 1 | Vesa-Halterung-Set | ABS | Bopla | 2x Kunststoffteile, 4x Schrauben |
| 5 | 6 | Schraube TX 3 x 15 mm | V2A | Bopla | Gehäuse |
| 6 | 6 | Schraube TX 2.9 x 9.5 mm | V2A | Montageplatte | |
| 7 | 1 | Montageplatte | Acryl | OBP | Dicke 3 mm |
| 8 | 12 | Abstandsbolzen M2.5 x 8 mm | V2A | TFT-Ansteuerplatine, OBP-HAT | |
| 9 | 4 | Abstandsbolzen M2.5 x 15 mm | V2A | Lautsprecher | |
| 10 | 4 | Abstandsbolzen M2.5 x 16 mm | V2A | Raspberry Pi / Waveshare Board B | |
| 11 | 18 | Federscheibe M2.5 | V2A | ||
| 12 | 32 | Schraube TX M2.5 x 6 mm | V2A | ||
| 13 | 4 | Schraube TX M2.5 x 8 mm | V2A | TFT Stromversorgung, IR-Empfänger | |
| 14 | 4 | Mutter M2.5 | V2A | TFT Stromversorgung, IR-Empfänger | |
| Elektronikteile | |||||
| 15 | 1 | 10″ TFT Display | 1000 nits | ||
| 16 | 1 | TFT Ansteuerplatine | FR4 | HDMI | |
| 17 | 1 | LED Stromversorgung | FR4 | TFT Backlight | |
| 18 | 1 | TFT Tastaturplatine | FR4 | wird nicht benötigt | |
| 19 | 1 | OBP-HAT | FR4 | OBP | mit integrierten GPS |
| 20 | 1 | IR-Empfänger mit LEDs und Flachbandleitung | FR4 | OBP | |
| 21 | 1 | Adapterplatine | FR4 | OBP | Touch |
| 22 | 1 | Taster | V2A | Ein/Aus Schalter | |
| 23 | 1 | Lautsprecher | ABS | 4W | |
| 24 | 1 | Buchse M12, 5 pol. | V2A | NMEA2000 | |
| Zukaufteile | |||||
| 25 | 1 | Raspberry Pi / Waveshare Board B | FR4 | Waveshare mit CM4-Modul | |
| 26 | 1 | HDMI Flachband-Kabel | HDMI Std. zu HDMI Std. | ||
| 27 | 1 | USB-SD-Card Adapter (optional) | CM4 mit eMMC | ||
| 28 | 1 | Micro USB Speicherstick (optional) | CM4 mit eMMC | ||
| Software / Firmware | |||||
| 29 | 1 | micro SD-Card 32 GB | Image | OBP | Linux mit AVnav |
Mechanischer Zusammenbau
Display einkleben
Beim Einbau des Displays ist größte Sorgfalt notwendig, denn die Fixierung des Displays über die Klebestreifen kann nur sehr schwer wieder entfernt werden. Probieren Sie den korrekten Sitz des Displays, bevor Sie die Schutzfolie von den Klebestreifen entfernen. Machen Sie sich am besten vorher Markierungen, an welcher Stelle das Display eingesetzt werden sollte und üben Sie den Einbau des Displays, denn ein Nachkorrigieren der Klebestreifen ist nicht möglich. Der korrekte Sitz muss beim ersten Mal gelingen. Achten Sie auch auf das orange Flachbandkabel vom Display. Es sollte beim Einbau nicht zwischen Klebestreifen und Gehäuse kommen. Anderenfalls kommt es sonst zu Undichtigkeiten. Das zweipolige Kabel für die LED-Hintergrundbeleuchtung darf nicht eingequetscht werden und muss in der Gehäuse-Aussparung herausgeführt werden.
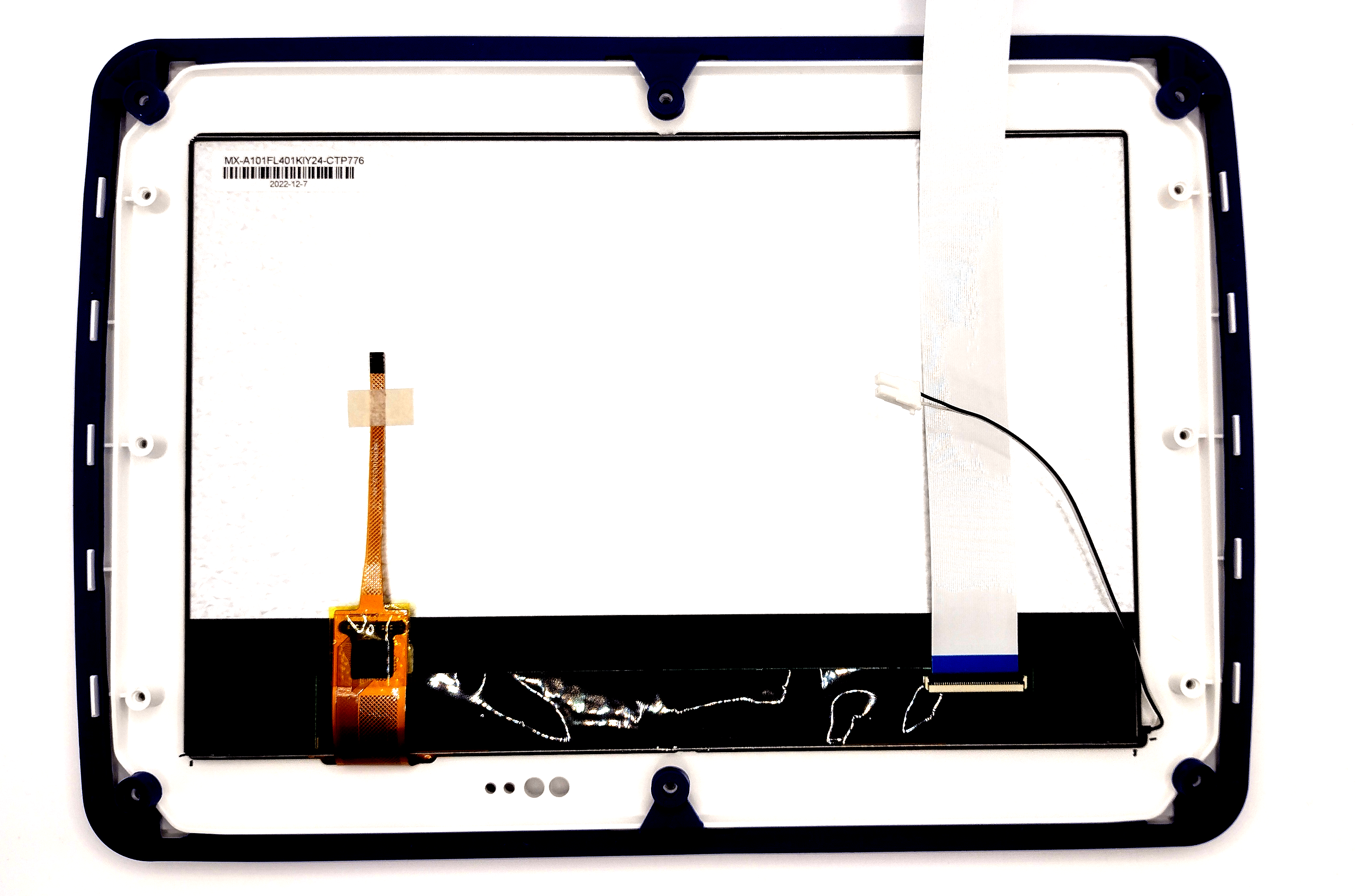
Abb.: Gehäusedeckel mit 10″-Display
Nachdem das Display eingebaut wurde, drücken Sie mehrere Male mit zwei Fingern entlang der Klebestreifen das Display an das Gehäuse.
Zum Schluss bringen Sie das Flachbandkabel am Display an. Der schwarze Bügel muss an der offenen Seite vorsichtig nach oben angehoben werden, damit das Flachbandkabel eingeschoben werden kann. Gehen Sie dabei vorsichtig vor. Der Bügel kann schnell beschädigt werden. Das Flachbandkabel wird mit der blauen Seite nach oben mittig in den Stecker eingeführt, bis es am Ende des Schlitzes spürbar ankommt. Danach wird der schwarze Bügel herunter geklappt bis er einrastet.
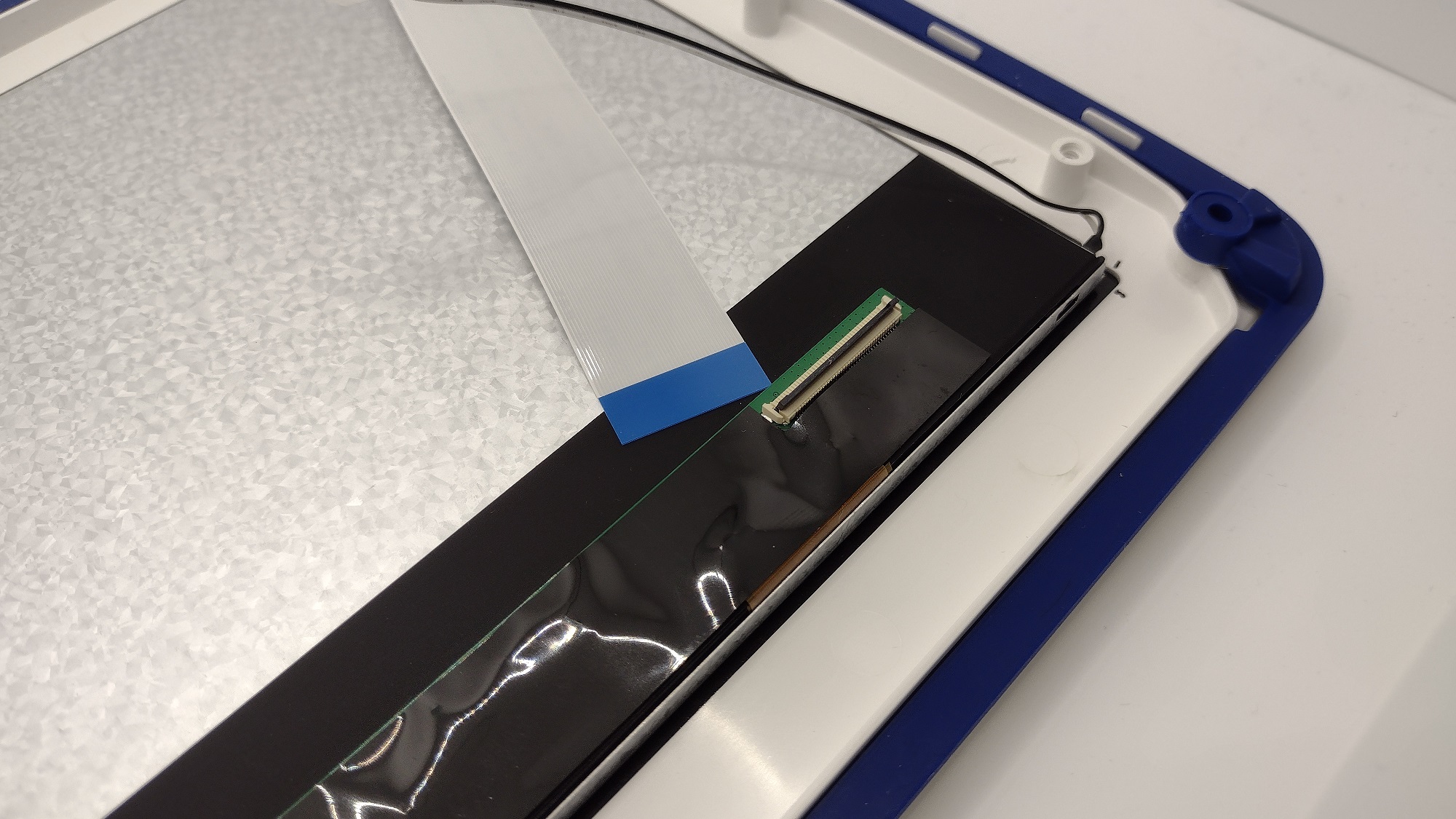
Abb.: Offener Befestigungsbügel für das Flachbandkabel
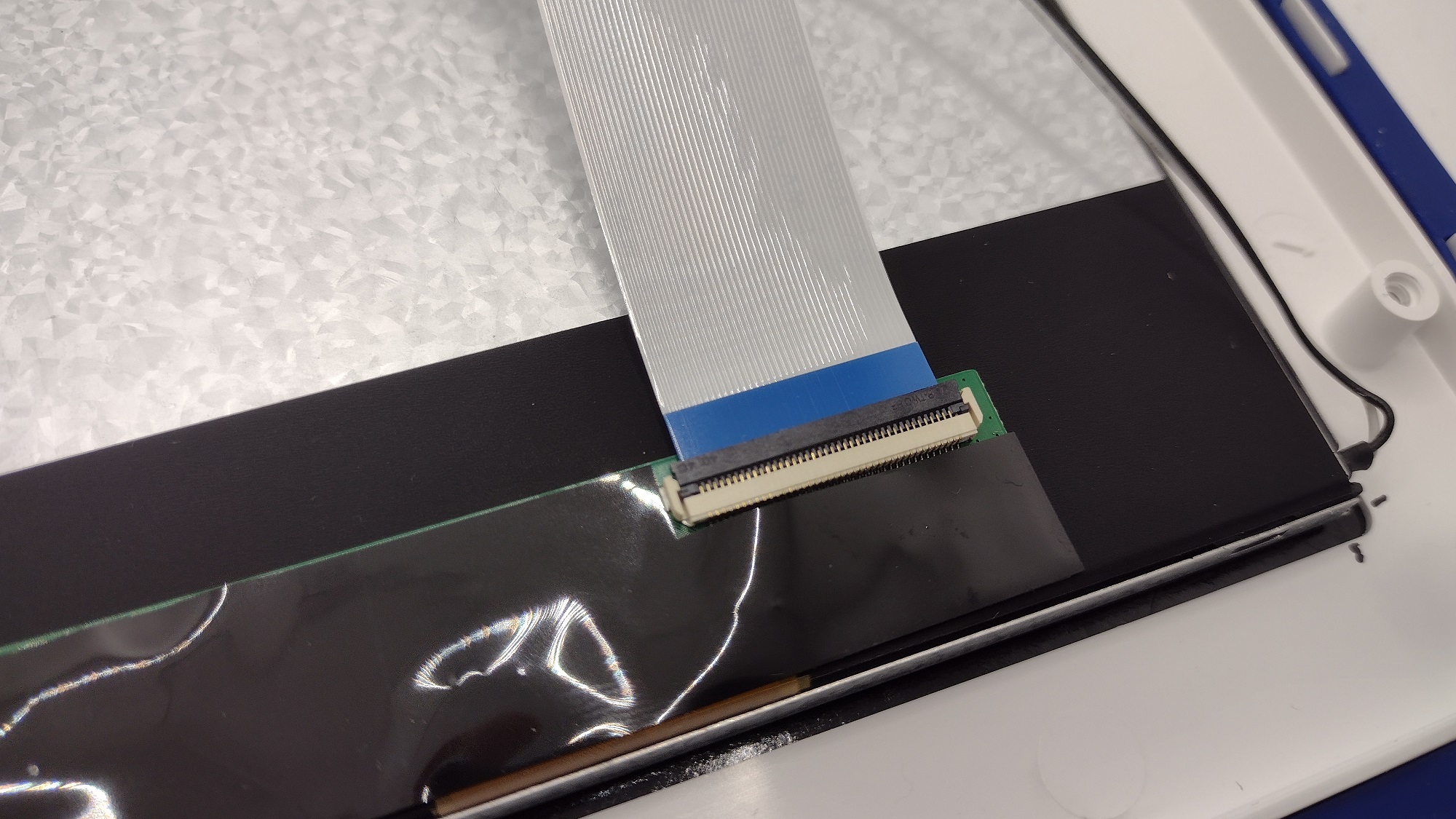
Abb.: Geschlossener Befestigungsbügel
Abstandsbolzen einsetzen
Die Abstandsbolzen werden so eingesetzt wie Sie das im Bild sehen. Die hinteren 4 Abstandsbolzen sind 16 mm lang. Die Abstandsbolzen für der Lautsprecher sind hingegen 15 mm lang. Alle Abstandsbolzen werden von unten mit einer Federscheibe und Schraube befestigt. Ziehen Sie die Schrauben nicht zu stark an, damit sich die Bolzen nicht schräg stellen und in die Kunststoffplatte eindrücken können.
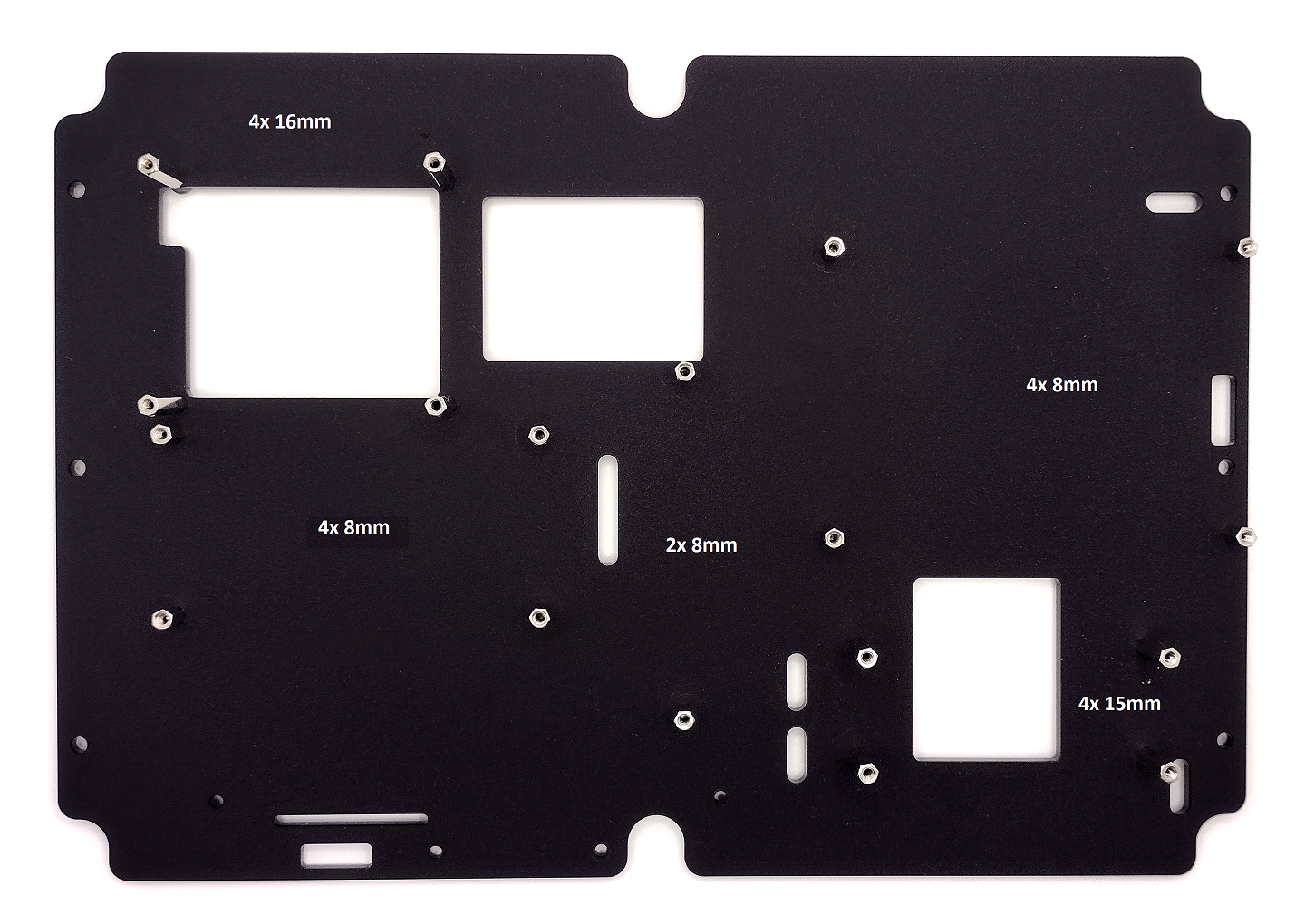
Abb.: Montageplatte mit Abstandsbolzen
IR-Empfänger einbauen
Die IR-Empfänger-Platine wird auf der Rückeite der Montageplatte mit jeweils zwei Schrauben mit Federring und Mutter so wie im Bild dargestellt angeschraubt.
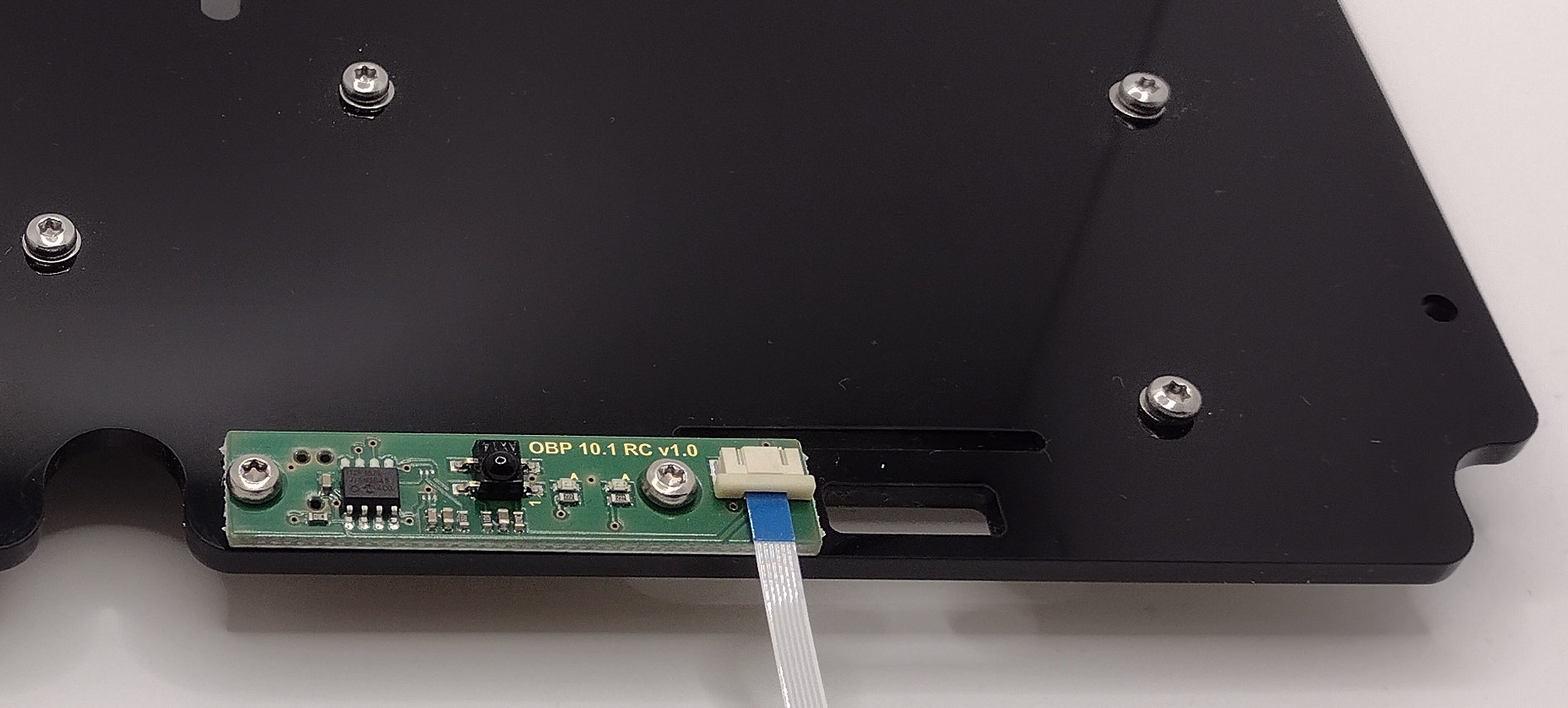
Abb.: IR-Empfänger-Platine
Platinen einbauen
Die Platinen werden so eingebaut wie es im Bild zu sehen ist. Die Tastaturplatine in der Mitte kann auch entfallen, da sie nicht unbedingt benötigt wird.
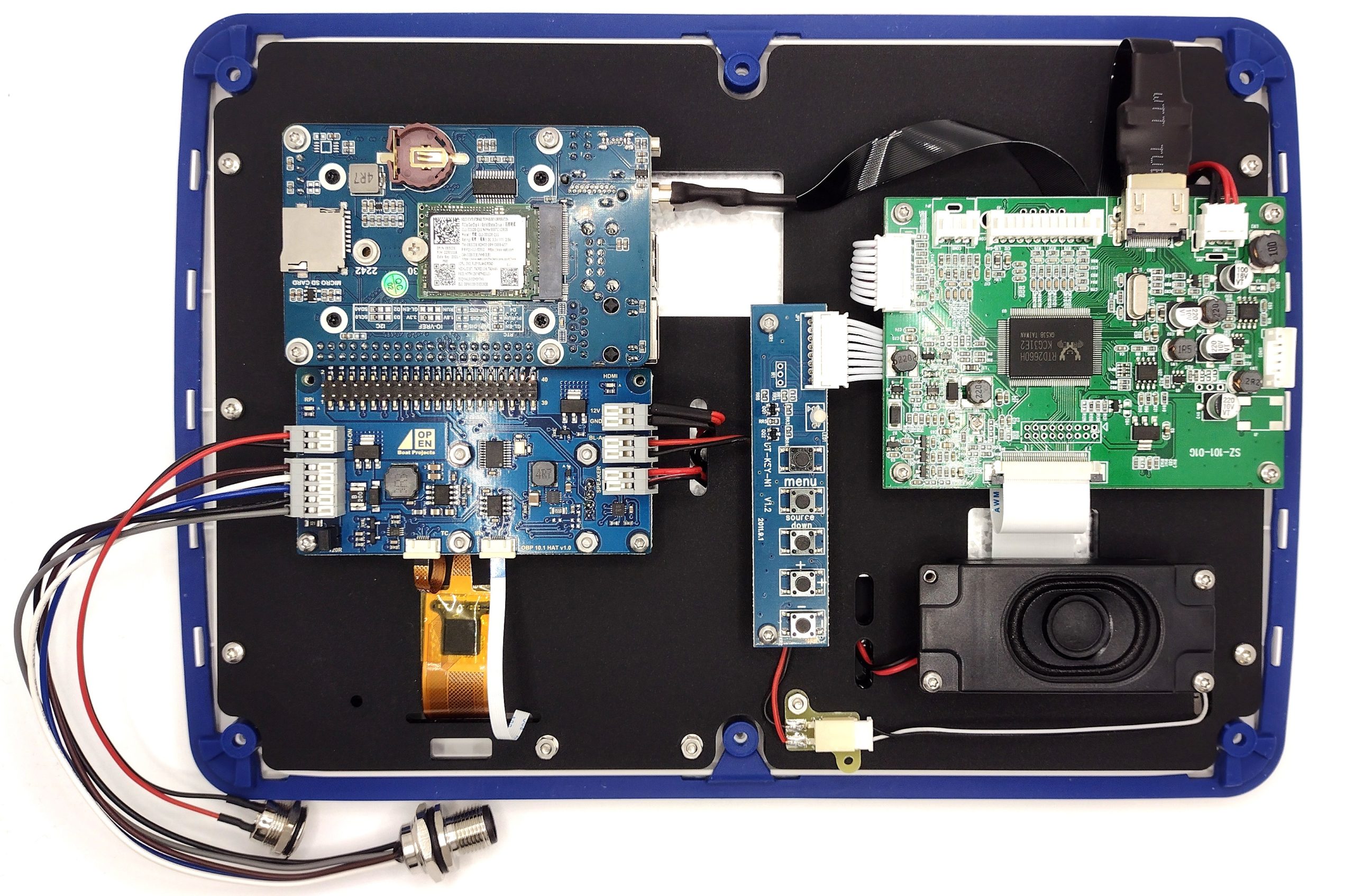
Abb.: Platinen eingebaut und verkabelt
Verkabelung
Für die Verkabelung müssen einige Kabel vorbereitet werden. Das bezieht sich auf die korrekte Länge und das Abisolieren und Verzinnen der Kabelenden. Die Kabel sollten ungefähr in einer Länge von 5…6 mm abisoliert und verzinnt sein.
- Lautsprecherkabel
- einkürzen und Enden verzinnen
- HDMI-Versorgungskabel
- Hohlstecker-Buche ablöten und paarweise Kabel verzinnen
- NMEA2000 Stecker
- Enden abisolieren und verzinnen
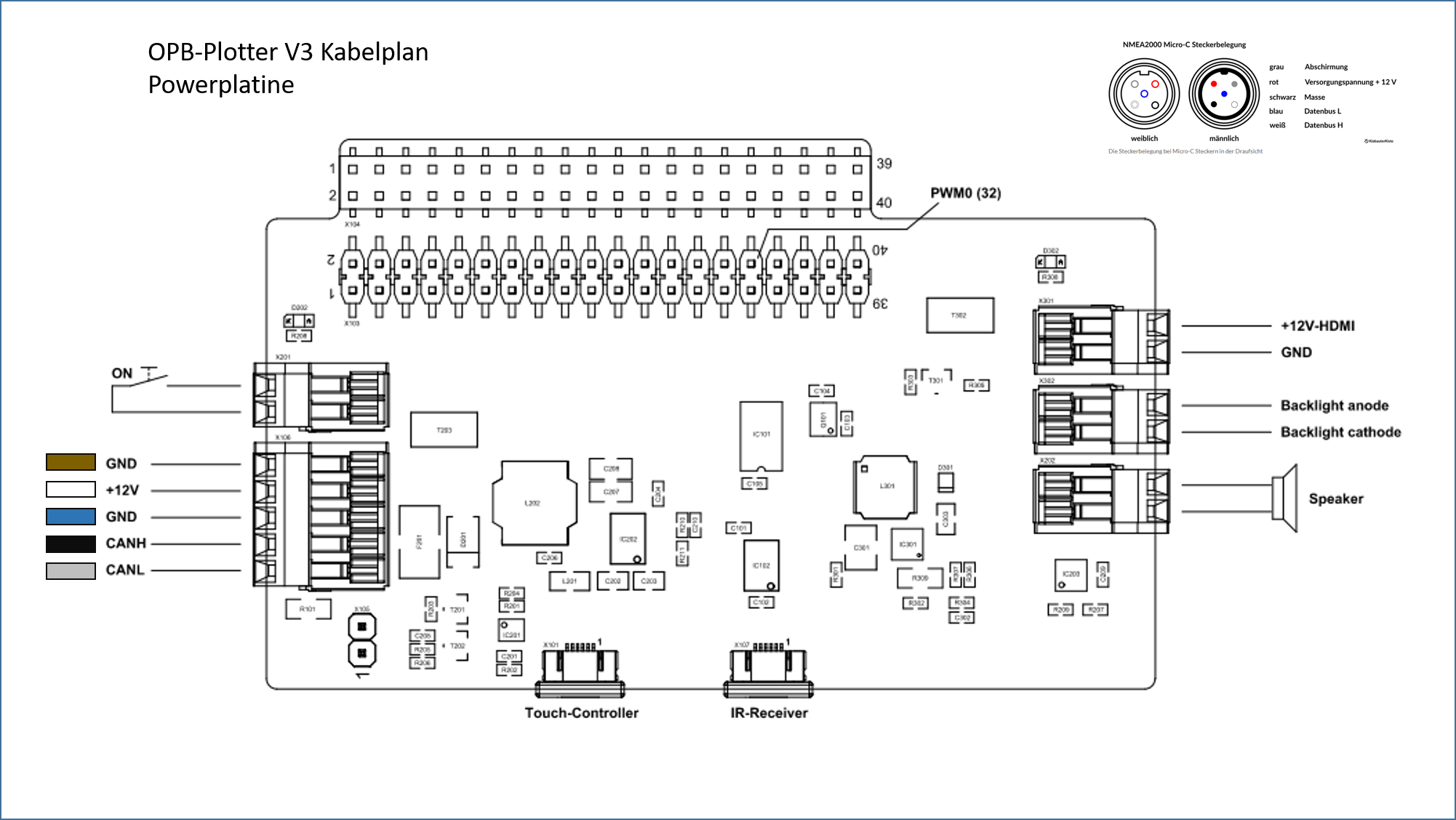
Abb.: Kabelplan
Die Kabel vom Lautsprecher und der HDMI-Platine sind sehr empfindlich. Bei zu viel Druck beim Abisolieren werden schnell einige Litzenadern durchtrennt und schwächen den schon recht knapp bemessenen Querschnitt. Gehen Sie vorsichtig beim Abisolieren vor und erhitzen die Litze nicht zu lange beim Verzinnen, da sich sonst die Isolierung einschmilzt und zurückzieht. Auf dem Raspberry Pi HAT befinden sich graue Anschlussterminals, in denen sie die Kabel anschließen können. Mit einem schmalen Schraubendreher mit 3…4 mm Klingenbreite kann der Anschluss geöffnet werden, indem der weiße Schieber zur Außenseite der Platine geschoben wird. Stecken Sie dann das Kabel bis zum Anschlag hinein und schließen Sie den Schieber in entgegengesetzte Richtung, indem Sie die Klinge in den Schlitz einführen und bewegen.

Abb.: Raspberry Pi HAT (links unten NMEA2000-Verbindung)
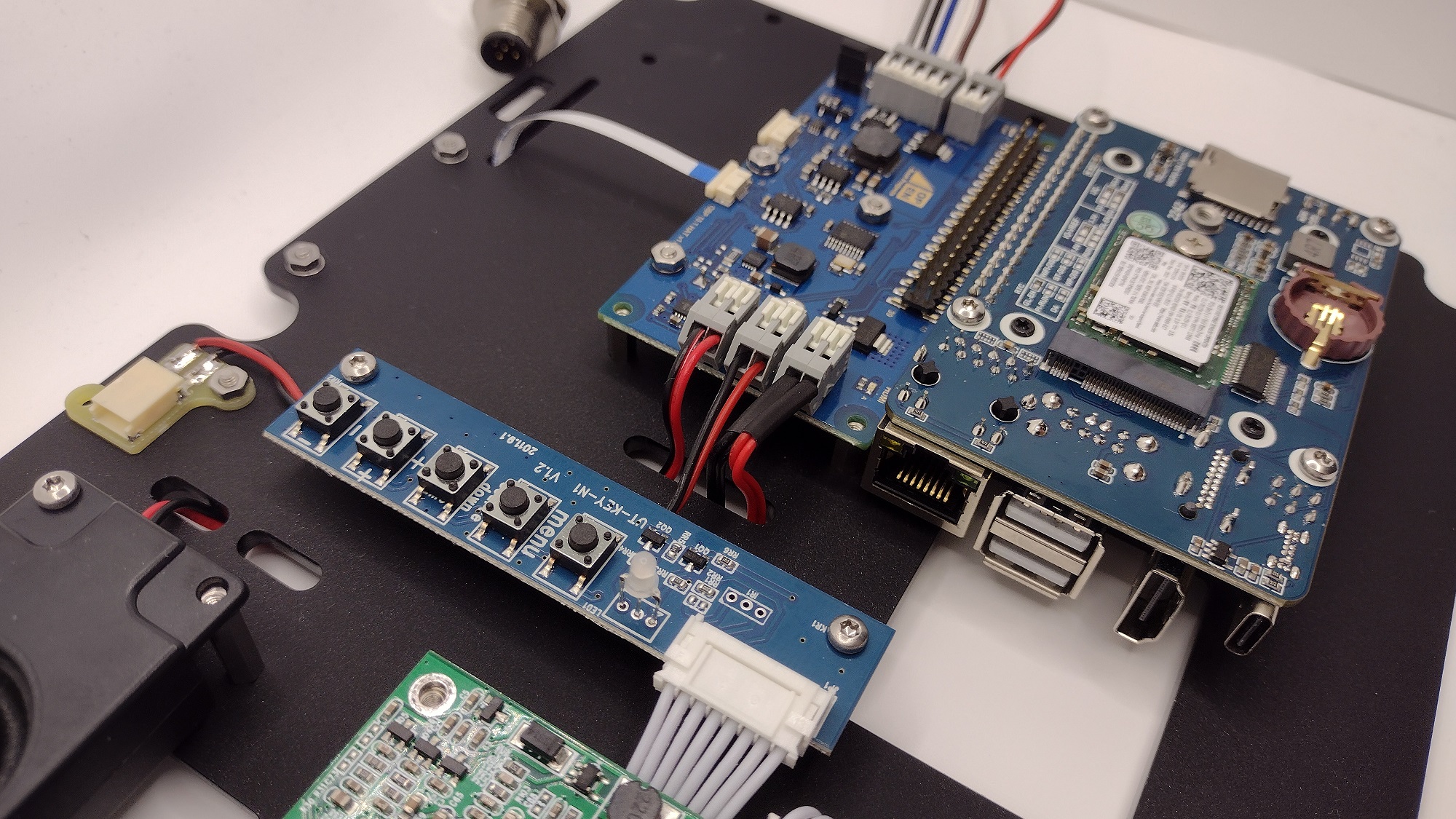
Abb.: Tastaturplatine
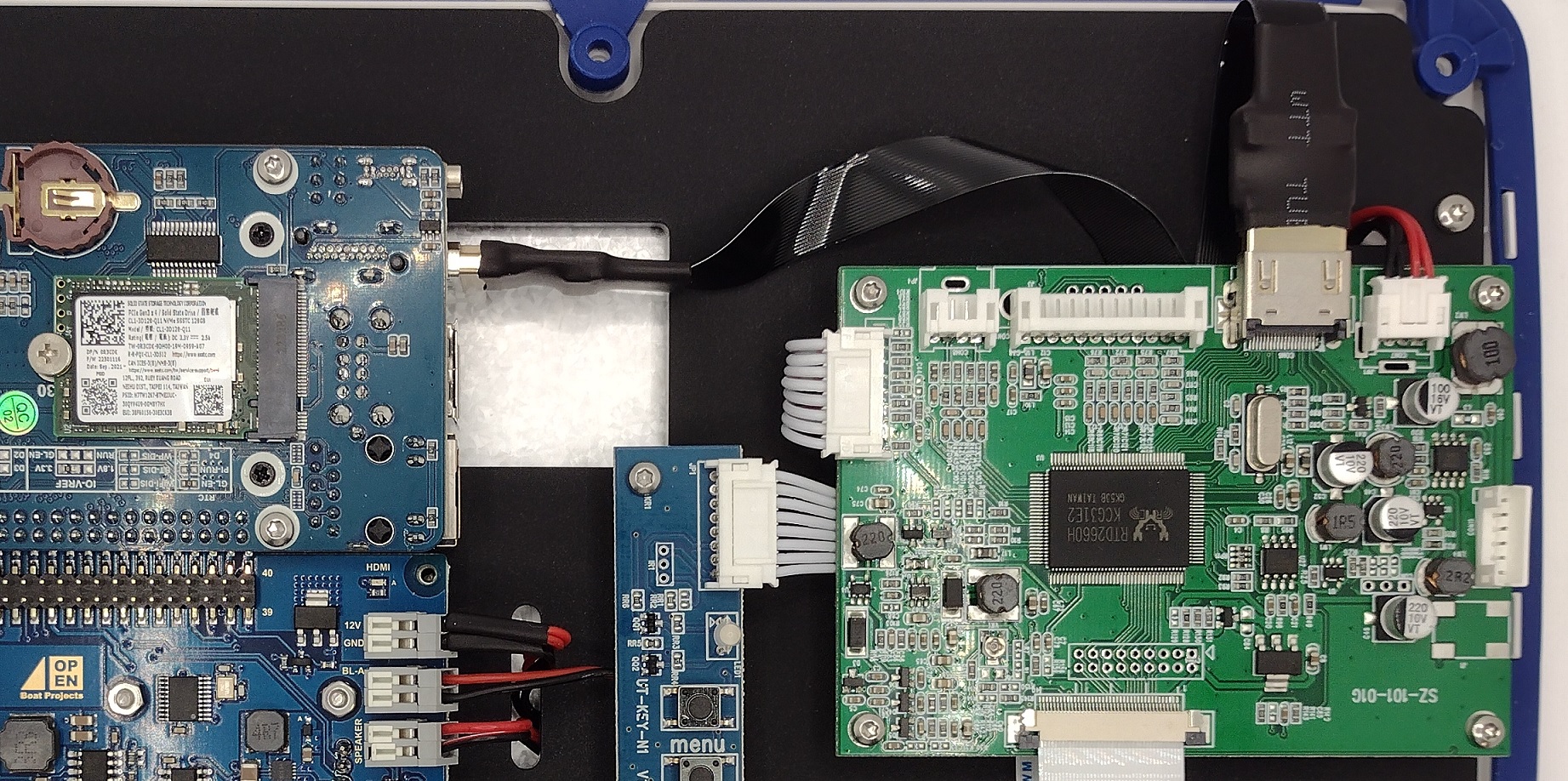
Abb.: HDMI-Verbindung zwischen Raspi und HDMI-Controller
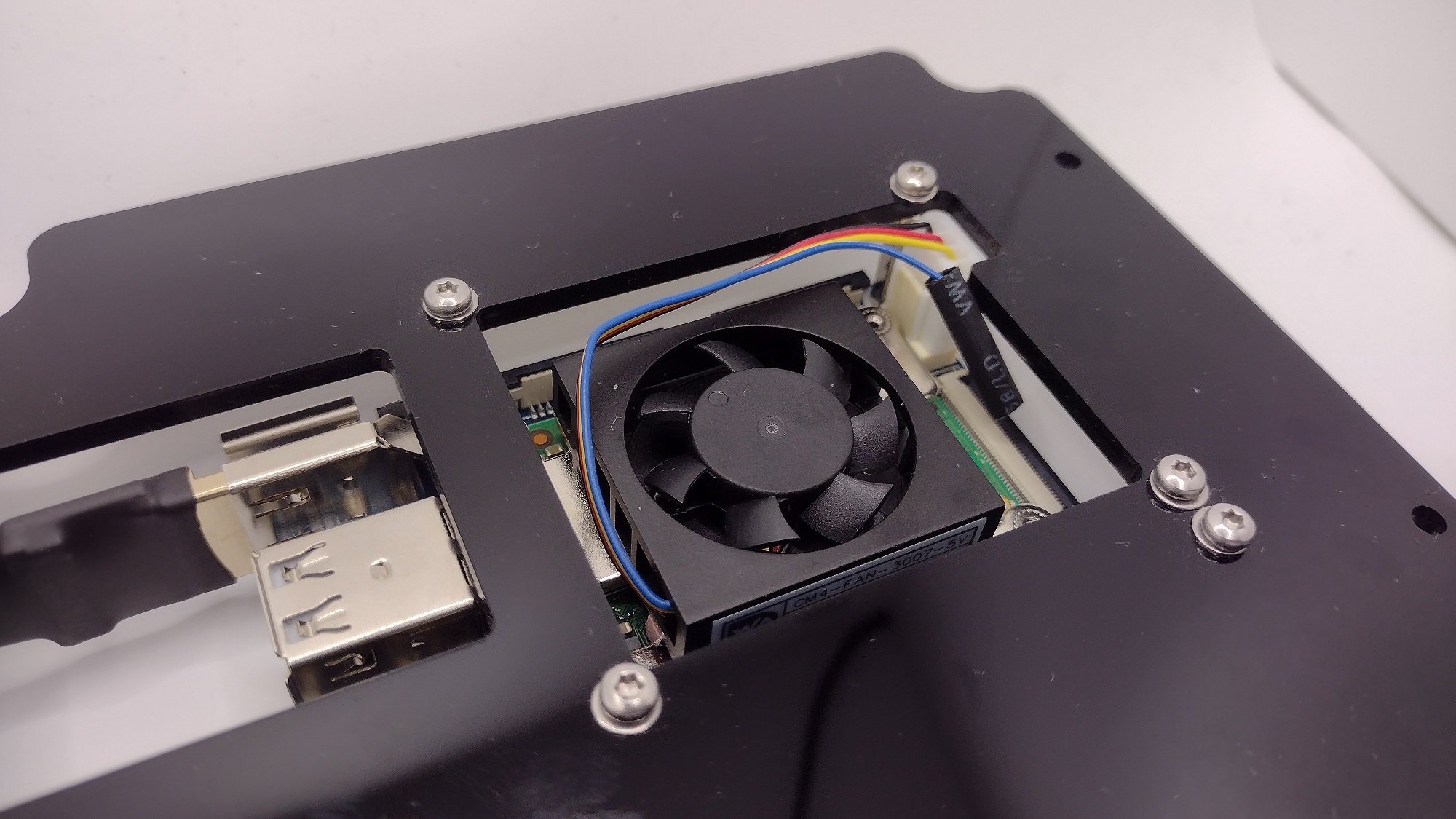
Abb.: Lüfterkabel mit entfernter PWM-Steuerung (blaues Kabel)
Die Befestigung des Flachbandkabels für den Touch und die IR-Platine erfolgt etwas anders als beim Display-Flachbandkabel. Zum Öffnen der Befestigung ziehen Sie den äußeren Rahmen um ca. 1…1,5 mm nach vorne heraus. Dann können Sie das Flachbandkabel mit der schwarzen bzw. blauen Seite nach oben einführen und den Rahmen wieder vorsichtig an den Seiten einschieben. Überschüssiges Flachbandkabel kann in einer Schleife unter die Platine geschoben werden. Achten Sie darauf, das Flachbandkabel möglichst nicht zu knicken.
Abb.: IR-Empfänger Anschlusskabel unten (Touch fehlt noch)
Die Verlegung der Kabel vom Lautsprecher, der HDMI-Stromversorgung und der LED-Display-Beleuchtung kann auf der Rückseite der Montageplatte erfolgen. Mit etwas Tesafilm können die Kabel sauber sortiert auf der Rückseite befestigt werden.
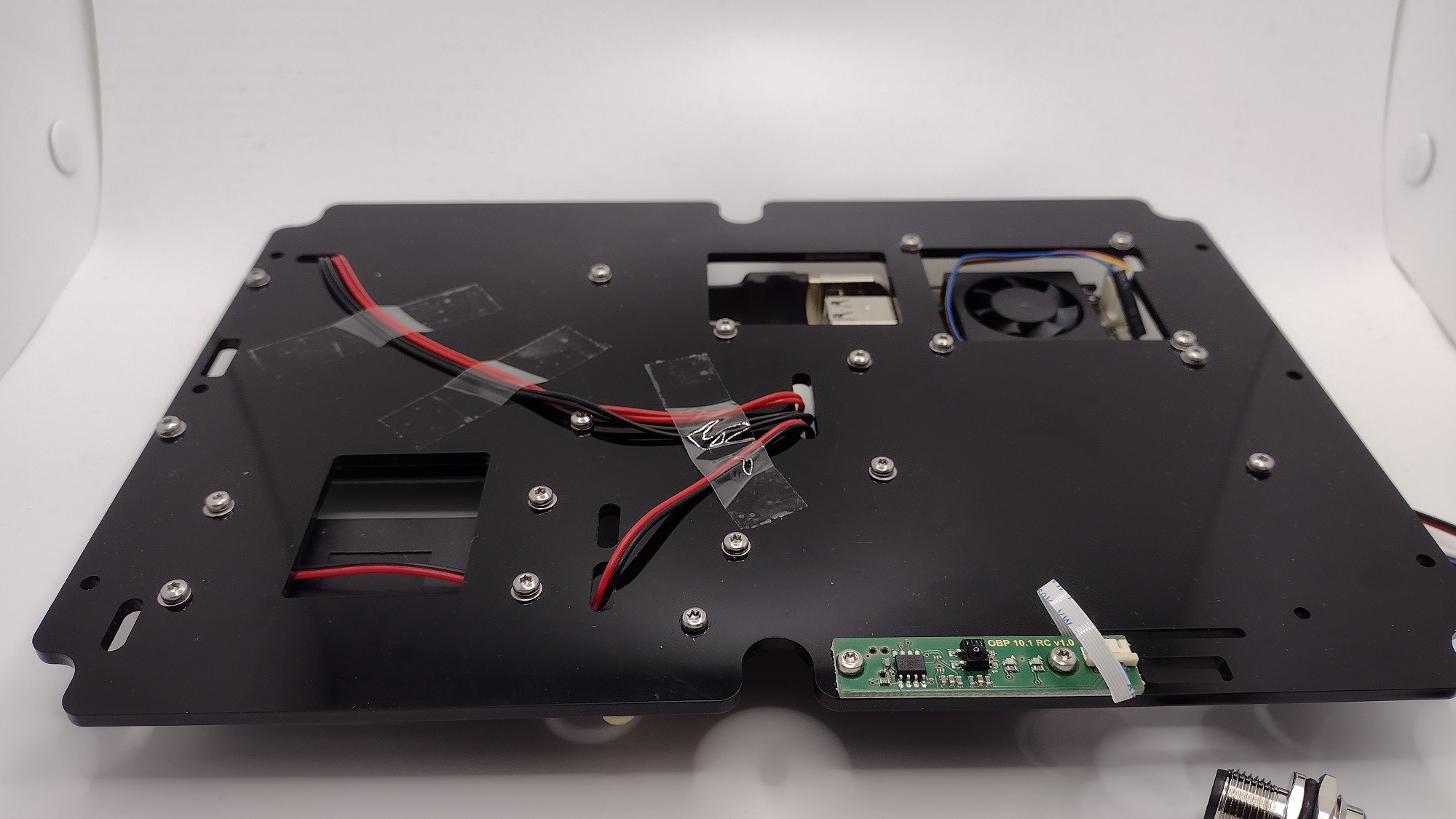
Abb.: Rückseite Montageplatte
Systemtest
…
Am Ende werden alle Schrauben mit Schrauben-Sicherungslack oder Nagellack gesichert.