Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.

Abb: Windsensor Yachta
Der Windsensor Yachta ist eine Weiterentwicklung eines Windsensors vom User Yachta der bei Thingiverse vorgestellt wurde. Das technische Funktionsprinzip basiert auf einem Hallsensor für die Messung der Windgeschwindigkeit und auf einem magnetischen Rotationssensor zur Messung der Windrichtung. Udo aus dem Segeln-Forum hat die Idee aufgegriffen und einige Verbesserungen am Windsensor vorgenommen. Das Schalenrad des Windrades wurde in mehrere Teile zerlegt, so dass der 3D-Druck einfacher wird. Zusätzlich hat er die Elektronik überarbeitet. Dabei ist ein anderer magnetischer Rotationssensor ausgewählt worden, der einfacher zu beschaffen ist. Als Auswerte- und Kommunikationseinheit wird der bei Bastlern beliebte ESP-12E verwendet. Neben dem Yachta Windsensor hat Udo auch noch einen weiteren Windsensor neu konstruiert und einige Punkte im mechanischen Aufbau weiter verbessert. Die Zielsetzung bei Udos Konstruktionen war, dass sich die Windsensoren einfach nachbauen lassen ohne Spezialteile aus Metall zu benötigen. Alle nötigen Teile kann man als Hobbyist im Fachhandel und im Baumarkt beziehen.
Sowohl Udo als auch Jukolein haben eine Firmware für den Windsensor Yachta geschrieben die unterschiedliche Funktionalitäten aufweisen. Mit beider Firmware können die Messdaten als NMEA0183 Telegramme per WiFi übertragen und in entsprechender Software wie z.B. AVnav, OpenCPN verarbeitet werden. Bei der Firmware von Jukolein können die Messdaten auch auf einer Webseite angezeigt werden. Die Firmware von Norbert die für den Windsensor WiFi 1000 verwendet wird, kann auch für den Windsensor Yachta genutzt werden. Diese Firmware ist universell und unterstützt auch andere kommerzielle und nicht kommerzielle Windsensoren. Von der Funktionalität her bietet diese Firmware die größten Möglichkeiten und besitzt ebenfalls eine Weboberfläche zur Visualisierung und Bedienung.
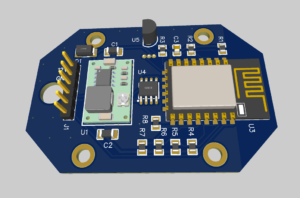
Abb: Platine Windsensor Yachta
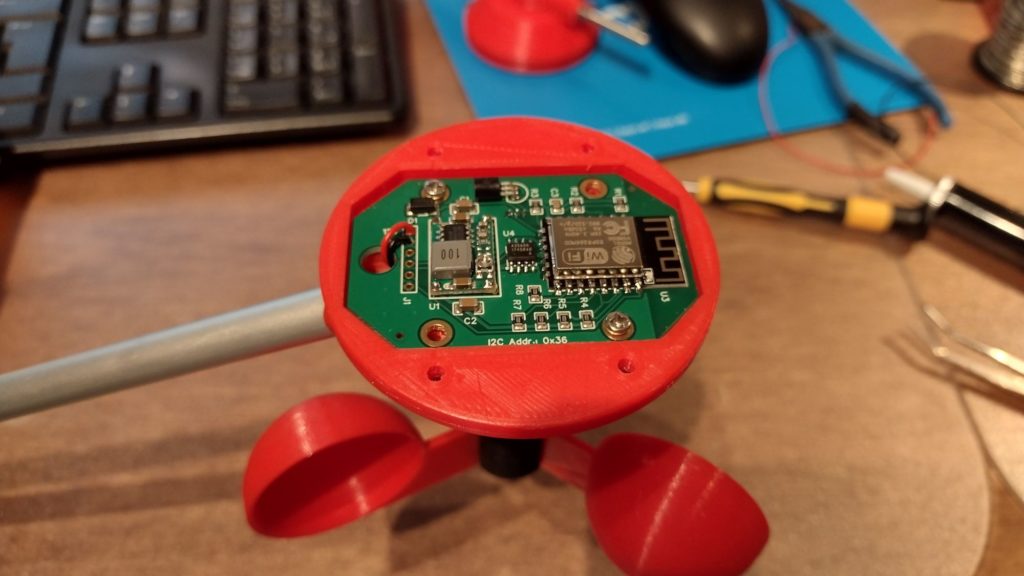
Abb: Eingebaute Platine
Die Platine von Udo wurde noch einmal von Norbert überarbeitet und in einigen Punkten verbessert. Die Platine kann unkompliziert über das Internet bei Aisler in kleinen Stückzahlen bezogen werden. Alle notwendigen Fertigungsdaten sind bei Aisler hinterlegt. Der Bestellvorgang ist denkbar einfach.
Dieser Windsensor verdeutlicht sehr anschaulich welche Möglichkeiten DIY-Projekte mit Open Software und Open Hardware bieten. Ohne die Offenheit wäre eine Weiterentwicklung und Verbesserung durch unterschiedliche Personen kaum möglich gewesen.
Eigenschaften Windsensor Yachta
- Messung von Windspeed 0…75 kn und Windrichtung 0…360°
- Winkelauflösung 0,1°
- Robuste Mechanik (3 Kugellager)
- Ohne Spezialteile aus Metall
- Alle Bauteile findet man im Fachhandel und Baumarkt
- Einfache 3D-Teile
- Gewicht ca. 210g
- Wetterfest und UV-stabil
- Keine Kabel für Sensorsignale notwendig
- Digitale Signalübertragung per WiFi
- Versorgungsspannung 6…25V
- Stromaufnahme 30mA @ 12V (0,36W)
- 12V Versorgung über Toplicht möglich
- ESP8266 für WiFi und Datenübertragung
- Aktualisierungsrate 1 Messwert pro Sekunde
- Kein Einbauinstrument notwendig
- Visualisierung in OpenPlotter auf einem Laptop, Handy oder Tablett
- Webinterface zur Bedienung
- Keine Extrasoftware notwendig (Display ist die Anzeige)
- Unterstützt das NMEA 0183 Protokoll
- Firmwareupdate via Internet möglich
Firmware Eigenschaften
Udo Firmware
- Webkonfiguration für IP Einstellungen Port 80
- UDP Port 2948
- UDP NMEA0183 Telegramm MWV
Jukolein Firmware
- Webkonfiguration und grafische Visualisierung
- Webserver Port 80
- UDP Port 8080
- TCP Port 8080
- UDP/TCP NMEA0183 Telegramm MWV
- Firmwareupdate OTA via Arduino IDE
Wifi 1000 Firmware
- Webkonfiguration und grafische Visualisierung
- Webserver Port 80
- TCP Port 6666
- TCP NMEA0183 Telegramme MWV, VWR, VPW
- TCP NMEA0183 kundenspezifische Telegramme INF, WST, WSE
- JSON Schnittstelle über http://192.168.4.1/json
- Firmwareupdate via Internet über GitLab
- Android App
Nutzung
Der Windsensor Yachta kann gut in Kombination mit einem Raspberry Pi mit z.B. OpenPlotter oder AVnav benutzt werden. Der Raspberry Pi stellt dann einen Access Point im WiFi Netzwerk zur Verfügung. Der Windsensor verbindet sich mit dem WiFi Netzwerk und überträgt die NMEA0183 Datentelegramme zum Raspberry Pi. Alle Endgeräte verbinden sich ebenfalls mit dem WiFi Netzwerk und könne die Messdaten die von OpenPlotter oder AVnav aufbereitet wurden grafisch anzeigen.
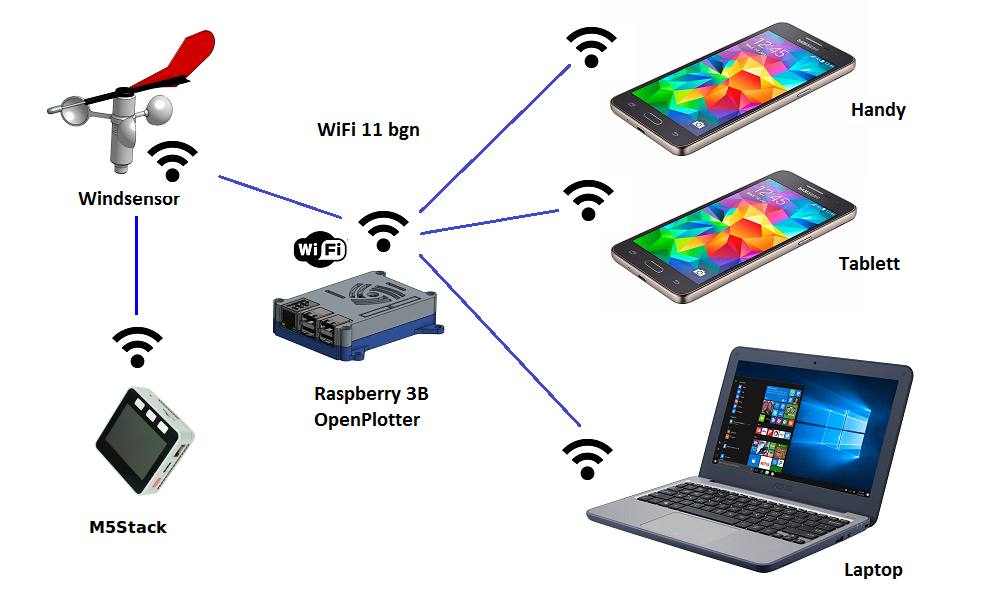
Abb: Verbindungsmöglichkeiten
Eine direkte Kommunikation vom Handy mit dem Windsensor ist ebenfalls möglich, wenn keine Messdatenverarbeitungs-Software benutzt wird. In der Firmware des Windsensors ist ein kleiner Webserver implementiert der die Messdaten direkt anzeigen kann. Die Leistungsfähigkeit ist aber etwas geringer als bei einem Raspberry Pi. Es lassen sich sinnvoller Weise nur 2…3 Endgeräte gleichzeitig mit dem Windsensor verbinden und Daten anzeigen. Des weiteren gibt es auch eine Android-WebApp mit der sich die Messdaten anzeigen lassen. Die WebApp ist ein rahmenloser WebBrowser der die Inhalte der Webseiten anzeigt und gleichzeitig dafür sorgt, dass sich der Bildschirm des Handys nicht automatisch ausschaltet, solange die App läuft.
Nachbau
Für den Nachbau wurde ein Repository bei GitLab angelegt. Dort sind alle Fertigungsunterlagen zu finden. Die mechanische Zusammenbauanleitung besteht aus einer Bilderserie, die die einzelnen Schitte des Zusammebaus zeigen. Am einfachsten ist es, wenn man sich das komplette Repositors als Zip-Datei herunterläd. Die Platine kann mit Hilfe der Gerber-Daten bei einem beliebigen Platinenhersteller in Auftrag gegeben werden. Der einfachste Weg der Platinenbestellung geht über Aisler, da dort schon alle Gerber-Daten hinterlegt sind. Eine kleine Serie von bestückten und programmierten Platinen wurde aufgelegt. Bei Interesse können Sie hier eine Nachricht über das Kontaktformular hinterlassen.
Achtung: Wer die Platine selber bestückt, sollte darauf achten, dass die Ausgangsspannung des DC/DC-Wandlers vor dem Einlöten auf 3.3V eingestellt wird. Anderenfalls wird sonst der ESP-12E durch Überspannung zerstört.
Eine ausführliche Zusammenbauanleitung ist hier zu finden: https://open-boat-projects.org/de/zusammenbauanleitung-windsensor-yachta/