Vorab ein paar wichtige Hinweise die sie unbedingt beachten sollten.
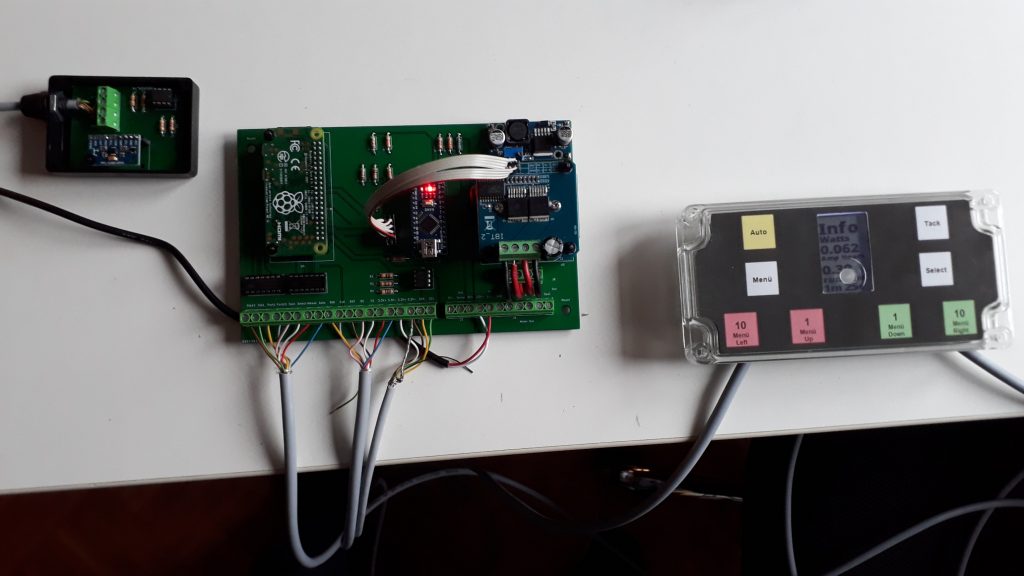
Abb.: PyPilot-Komponenten
Video: PyPilot in Aktion
pyPilot ist eine quelloffene Autopilot Hard- und Software von Sean D’Epagnier.
Eigenschaften:
- automatische Sensor-Kalibration
- Modi
- Kompass
- GPS
- scheinbarer Wind
- wahrer Wind
- SignalK und Nmea0183 Protokoll
- OpenCPN Integration
- geringer Stromverbrauch
user-experiance: http://phoenixketch.blogspot.com
video: https://youtu.be/IMqUmcTbQOE
IBT-2 based motor-controller: https://hackaday.io/project/168592-opencpn-chart-plotter-w-autopilot-and-waypoints
Andreas aus dem Segeln-Forum hat eine Hardwarebasis zum Nachbau des pyPilot erstellt. Er hat den Aufbau in drei Einheiten aufgeteilt:
- Kompassmodul
- MPU9260 / 6500
- Basisplatine
- Raspi Zero W
- Arduino Uno (Aktuator-Regelung)
- BTS7960B H-Brücke IBT-2 (Aktuator-Leistungsansteuerung)
- Bedieneinheit mit Display
- 8 Touch-Tasten TTP223
- LCD-Display JLX12864
Die verwendeten Komponenten sind größtenteils Module die im Bastelbereich frei erhältlich sind.
Link zu seiner umfangreiche Anleitung: https://github.com/AndreasW29/pypilot-tinypilot-mysolution-infos/tree/main/guide
Das Projekt ist natürlich auch im Segeln-Forum zu finden:
https://www.segeln-forum.de/thread/68916-pypilot/?pageNo=1
Ein umfangreiches Workbook in englischer Sparche ist hier zu finden:
https://github.com/pypilotWorkbook/workbook/wiki
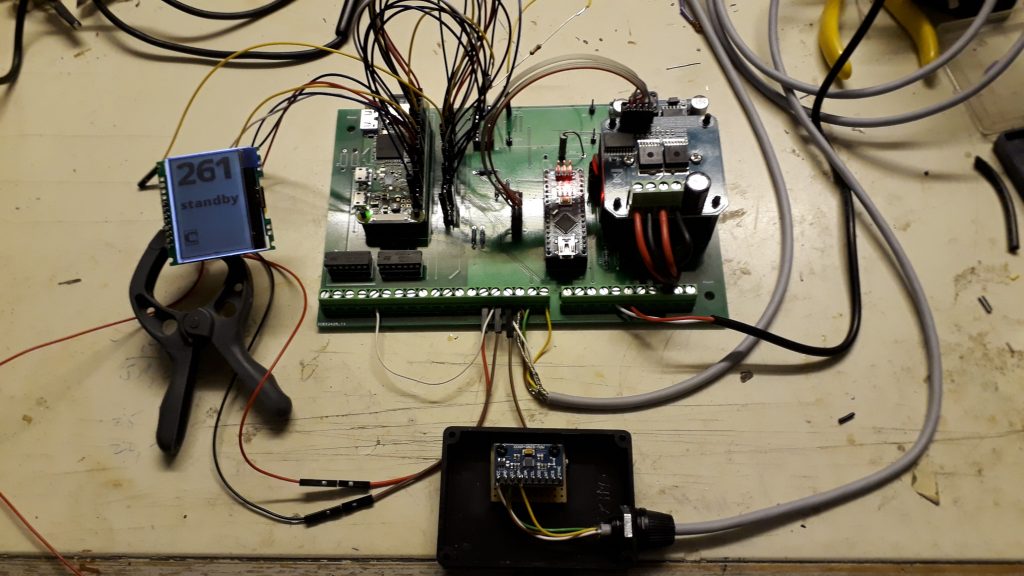
Abb.: Testaufbau
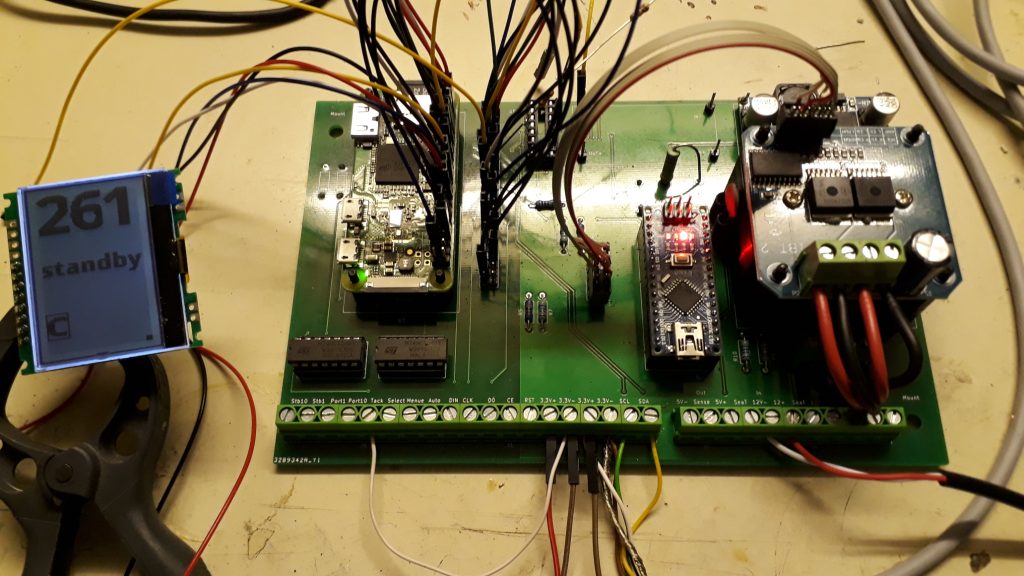
Abb.: Testaufbau
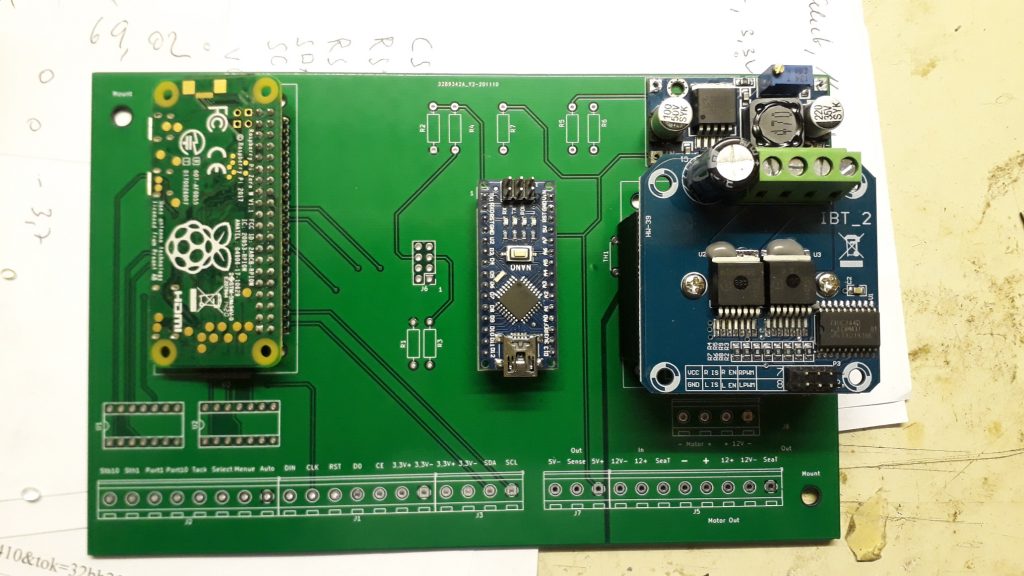
Abb.: Hauptplatine unbestückt
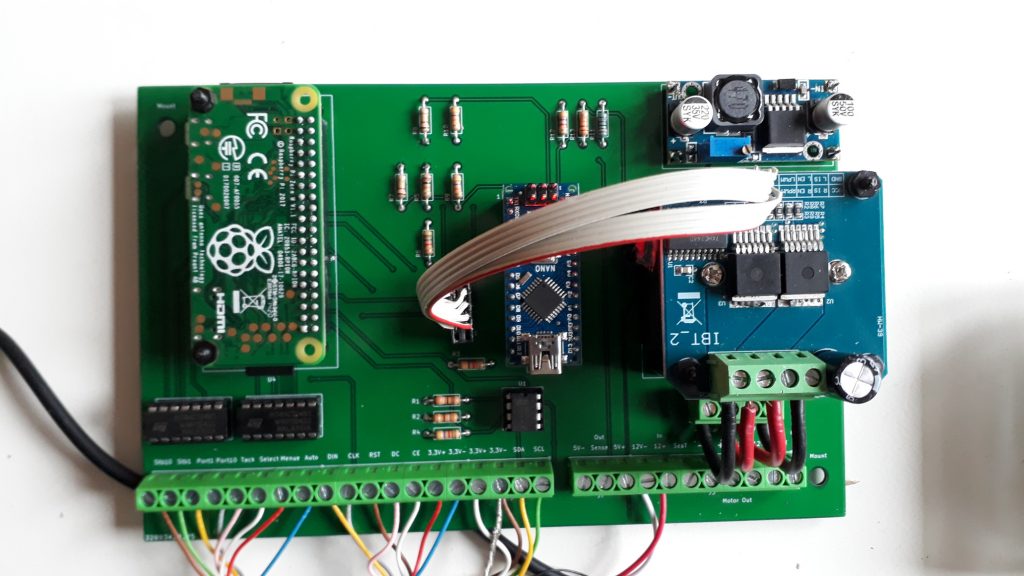
Abb.: Hauptplatine betsückt

Abb.: 9-Achs AHRS
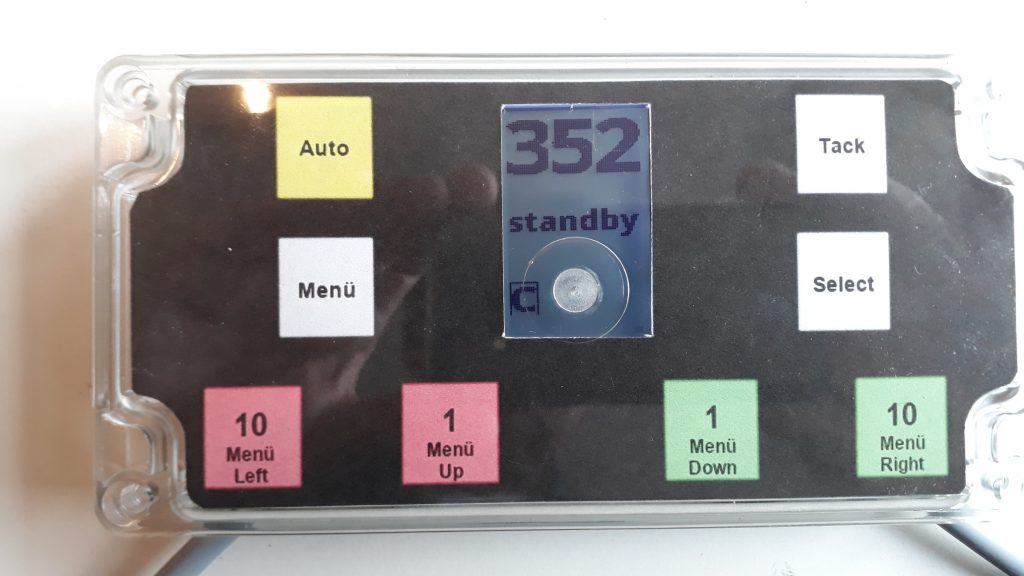
Abb.: Bedieneinheit mit wasserdichten Touch-Tasten
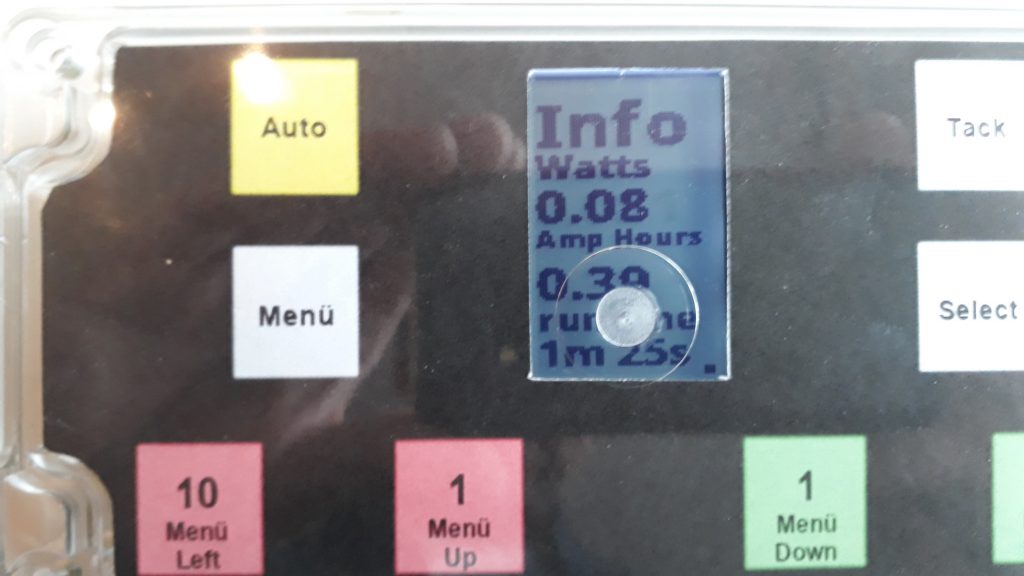
Abb.: LCD-Display in Bedieneinheit (der Anguss-Stutzen stört noch ein wenig)
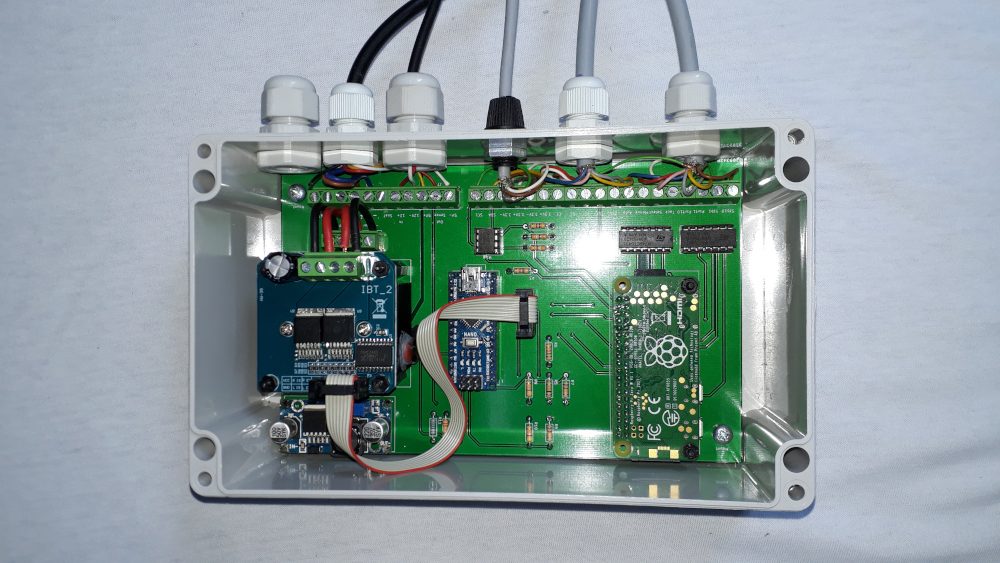
Abb.: Einbaufertige Controllereinheit mit Leistungstreiber, Arduino Uno und Raspberry Zero

Abb.: Controllereinheit, Bedieneinheit, Gyro und Aktuator von pcnautic

Abb.: Fertig eingebauter PyPilot
Wer den PyPilot nicht selber aufbauen möchte, der kann auch bei pcnautic ein fertig aufgebautes und programmiertes System kaufen. Der Raspberry Pi und der 9-Achs-Bewegungssensor befinden sich im Bediengehäuse. Das erfordert damit eine fixe Installation des Bedienteils, um eine feste Ausrichtung des Bewegungssensors zum Boot zu gewährleisten. Auf der Rückseite des Bedienteils befindet sich eine USB-Buchse über die ein NMEA0183-Bus über ein RS485/USB-Adapter angeschlossen werden kann. Darüber lassen sich dann Kursdaten von einem Plotter, GPS- oder Winddaten einspeisen, die dann in die Kursberechnung einfließen können. Es lassen sich auch SeaTalk und NMEA2000 über entsprechende USB-Gateway-Module anbinden, die ebenfalls über pcnautic bezogen werden können.

Abb.: PyPilot Komponenten von pcnautic

Abb.: Aktuator, Bedien- und Controllereinheit und Leistungstreiber von pcnautic

Abb.: Rückseite Bedien- und Controllereinheit mit USB-Port und Anschluss für Steuerkabel zur Leistungseinheit
Wer sich nur den Linearaktuator von pcnautic gekauft hat, um ihn am PyPilot zu verwenden und Probleme mit dem Ruderlagengeber hat, findet hier eine Reparaturanleitung von Michael: Reparaturanleitung Ruderlagengeber
Als Ruderlage wird intern ein 10kOhm 10-Gang-Poti verwendet. Wenn es falsch angeschlossen wird, kann in den Endlagen das Poti durchbrennen, weil dann der Widerstand zu klein wird und der hohe Strom das Poti thermisch zerstört. Man kann das Ganze verhindern, indem man am Mittelanschluss einen 1kOhm Widerstand in Reihe einbaut, der den Strom begrenzt. Hier noch ein Datenblatt zum Linearaktuator.